Next sub-project: Where is my train? In other words: The feedback module from Uhlenbrock is not really compatible with Märklin M-track. To use the module I must either use magnets and reed switches or I must isolate one rail from the other in a section of track.
I do not think reed switches are easy to work with. And isolating a rail on M-track is impossible.
More surfing on the Internet. I ended up concluding that I have to choose between voltage sensors and current sensors. I chose current sensors, even though it means a little less voltage for the locomotives. I made the choice for these reasons:
1. My transformer has a high enough voltage and can provide plenty of current, so a little waste means nothing.
2. I could not find anywhere to buy the coils that are needed to build a voltage sensor.
3. I found a very cheap and easy way to build current sensors. And I even had all the needed components for a prototype, that worked fine right away.
I could maybe just switch the Uhlenbrock feedback module. There is an other model that is meant for 2-rail track, i.e. a module with built-in voltage or current sensors. But that is almost twice as expensive and it has only 8 input ports, whereas the 3-rail version has 16. So in effect, it is 4 times as expensive.
I could have gone all the way and built the entire feedback module myself. The LocoBOD project from SourceForge would probably work just as well and would easily be able to combine with my cheap current sensors.
But it is a bit of a mouthful to obtain and set up both a programmer for Atmel microcontrollers and a WinAVR development environment (as far as I understand, binary LocoNet code cannot be downloaded anywhere, because distributing it would violate Digitrax’s rights) in order to be able to compile the source code and download the generated binary to the micro controller. And with just a single module so far, and with a bigger urge to play with application code and to drive my trains than to play with micro controllers and embedded code, I am sticking to the 3-rail module from Uhlenbrock.
DIY electronics for current sensors, turnouts etc.:
Simultaneously with working on the feedback system, I also started to investigate how to build decoders for my turnouts and for the signals, that must also be part of my layout.
I got as far as an accessory decoder from OpenDCC for signals and Paco’s official website and his 4-servo decoder for turnouts. This lead to the next shopping round:
1. Micro servos meant for model planes (rc-netbutik.dk), but by me meant for turnouts and maybe some day to make a skater, a boat on a lake or a port in an engine house or something else that should move.
2. PIC programmer, PIC circuits, assorted capacitors and resistors, a larger amount of power diodes etc. – enough for both current sensors and a couple of decoders of each kind mentioned above. (reichelt.de)
I have combined current sensors and the Uhlenbrock feedback module on a veroboard:
Uhlenbrock feedback and a lot of current sensors
Each individual current sensor is made from very few components. They seem to be very reliable. The capacitor shown below is not necessary, so I have not added it. It was meant to prevent bouncing. But there is a timer function built into the Uhlenbrock module, so that it does not clear the signal until the input has been stable for a configurable number of miliseconds. And that provides the exact same functionality:
Diagram for a single current sensor
Pacos 4-servo dekoder was very easy to build. But you will not come far without a PIC programmer. And some decent soldering equipment, obviously. And a a reliable multi-meter. And a few other tools.
I have been building the decoder on a small piece of veroboard:
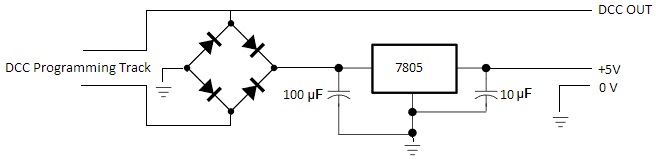
Later experience shows that Paco may have saved a little too much on capacitors. One of my decoders has become unstable, i.e. CV values seems to change themselves and turnouts do not move as they should.
The decoder has therefore been upgraded with bigger capacitors. Paco suggests 100 uF between rectifier and 7805 voltage regulator and 100 nF on the other side of the regulator. I have changed that to 470 uF and 100 uF. And then I have added a third capacitor (100 nF) close to pin 1 on the PIC between pin 1 and ground.
JMRI – my first experience with PC software to control model trains
Now that I know where my trains are, I could get on with the software part. I decided to try JMRI. It is open source and there by kind of the DIY style.
My education as well as my profession is all about developing software. So I am pretty sure all is going to be well, even though my first experiences shows that it does not work just out of the box: The IB-COM interface/”driver” in JRMI does not reliably recieve status from my feedback module, and thereby I don’t know where my trains are anyway. And in addition, it cannot control the turnouts. But I have solved both problems and sent the corrections back to the JMRI community.
I have however not yet testet JRMI properly. I.e., I have no idea which additional problems that might pop up, before my trains are automated. But I have a feeling that there may be multiple problems hidden inside JRMI.
It is very difficult to read the documentation and thereby get an overview of JRMI. It al seems a bit – to put it nicely – half done. Just to get basic “hole through”, I had to (as already implied) to install a Java development environment including a debugger and then simply start an ordinary debugging of the software.
Around the month of April and thereby the gardening season, I ran into a mechanical problem: I had built the servo decoders, but I could not mount the servos at my turnouts and make them work.
So no servo controlled turnouts.
Only greenhouse, lawn and tomatoes.
But decoder and servos work just fine, so I will make it work next fall.
I am starting over – this time using Märklin C track:
Why bother more with trying to make the M track turnouts work with servos?
My layout shall not be built with M track anyway. So I have now bought the track from a new Märkling start set. There is just enough to my oval with a siding and another blind piece of track.
Controlling a Märklin C track turnout using a servo:
WIth the help of to tiny pieces of plexiglass, a piece of 1 mm (later substituted by 0,6 mm) piano wire (modelskibet.dk) and some double sided tape (the best from Tesa), it was surprisingly easy to make the servos drive the turnouts:
Turnout with servo drive
The piano wire is attached to the same small plastic rod that Märklins original clack-clach drive utilizes. Only the servo does it slowly, without much noise and a lot more like in the real world. And to a fraction of the cost.
The piano wire is bent so that it has a zig-zag form shape in the servo end and so that it forms a small circle in the other end. Make sure the circle shape is oriented correctly, so that it fits flat around the rod. And make sure that the circle is at the center of the piano wire. If the circle is to one side of the wire, it will not work. See here.
There are two pieces of plexiglass: One underneath the servo to give it a slight distance to the turnout, where the servo horn can move. The other piece has a slot grinded into it, so that it can sit above and guide the piano wire as well as keep the piano wire onto the rod of the turnout.
I am using 3 mm plexiglass. The two pieces are about 10 x 25 mm and 20 x 25 mm. The piano wire is in a hole on the servo horn about 7 or 8 mm from the servo center.
Before mounting the servo in the turnout, it has to be connected to the decoder, so that it can be centered. Or to make it easier, buy a servo tester (roughly a potentiometer and a 555 timer).
First center the servo, then mount the horn. Then turn the servo so that it corresponds to the position where the piano wire and the rod on the turnout are fully extracted / visible. Then mount the piano wire to the servo and then the servo + wire to the turnout (using double sided tape).
Using double sided tape and not super glue has many advantages: It is easy. It is clean. No toxic fumes. (Except for the de-greaser that you need to use to clean the surfaces with first).
But first and foremost: The whole thing can be taken apart again without any harm to any part. Do not use violence. Instead, twist or push a srewdriver into the tape and twist. Then just roll the rest of the tape away using your fingers. Never tear into the servo or the turnout.
Parquet underlay instead of cork:
With my new C track, I also want to try out an other thing: Noise damping.
I have bought some parquet underlay (the smallest possible package, i.e. 15 square meters). That should be enough for many years to come. But it may be useable to build a wall or a mounting or something. It is a lovely shapeable material.
This is my prototype ready for the track. Note the markings for holes for servos and wires:
Oval with noise damping
Now, it is going to no trouble at all to get that bit og choo-choo train running. And now with remote controlled turnouts.
But ohh no: One of the servo decoders does not work. It seems to be the PIC that is defect. That can of course happen. And luckily I have a spare and a PIC programmer. So it did not take long to get it working.
Isolating the the center rail of Märklin C track:
Next problem: Well-functioning current sensors and feedback module is not enough. The new C track are much more difficult to work with considering isolating the center rail between two blocks than the old M track.
The old ones were easily isolated using just a tiny piece of paper. C track seems only to be possible to isolate using the small red plastic things available from Märklin.
They are ridicuosly pricy, difficult to mount and easy to destroy. Some of them cracked, so they do not isolate after all.
I will try to use tape or paper or something else. Or I might end up cutting the center rail on some of the track pieces.
Track piece with red thing
Bullet-proof, free, easy: Just break and remove the contacts on one of the track pieces. Paper does not work. And neither does the red things from Märklin. Not 100% anyway.
It looks like RocRail is much more stable. With the new C-track, it did not take me long to get automated train control via RocRail.
However, it does not yet work with longer trains. Only with very short ones. And even then, it is very random where the locomotive stops in a block. And every now and then, I see de-railments due to RocRail dispatching a train through a turnout that is not done switching.
More turnout problems:
I am having mechanical problems with one of my three turnouts: The piano wire is jumping of.
This piano wire problem simply got to be solved. I probably have to take the servo of and bend a new piece of wire and mount it all from the beginning. That has to work.
Update: Yes – it works.
It seems to be extremely important that the “eye” on the wire in the turnout end is in line with the wire itself, as is the case with the new wire seen mounted on the turnout on the picture below. The old wire has the “eye” to one side of the wire, which made it jump of.
Turnout with new wire. The old wire is on the table next to the turnout.
BUT: There is still a problem with the very same turnout. Even though the wire is no longer making trouble, the turnout does not switch perfectly. It moves a milimeter less than it should to one side. And then the train de-rails.
The problem seems to be that the mechanics is a tiny bit different in exactly that turnout. It requires a tiny bit more movement on the servo to push the mechanism to it’s endpoint. And Paco’s decoder only permits to adjust the total movement of the servo. Not the A and B end-points individually, which puts a demand on me to place the servo very precise in the middle so that the two end-points of the servo fits exactly with those of the turnout.
The problem gets worse, because my piano wire does not have any softness. It is a bit too stiff with it’s 1 mm diameter, and I have not managed to bend into a zig-zag shape. Had it been possible for the wire to bend a bit, if the servo movement was beyond the end-point of the turnout, it would have been a bit less of a problem.
Until further, I have been fiddling it to work by finetuning the length of the wire, so that the turnout just exactly functions. I need to find a better and easier solution before I go on “servofying” more turnouts.
But that will have to be later. For the time being, all my three turnouts are functional. I have in mind to use thinner wire, to bend the wire into a zig-zag shape and to use a different decoder or to modify the one, I am using. I might use this one: http://digital-bahn.de/bau_servo/sand4.htm or this: http://wiki.rocrail.net/doku.php?id=mgv136-en. I Have also been asking Paco about a modififed version of his decoder.
He is referring to this page: http://www.fucik.name/masinky/servo/. In addition, Paco has published his source code, and I think it is doable to introduce the additional configurability on my own. And I have also asked Fucik (the guy behind the other WEB site), if he is willing to publish his source code.
How do I get the train to stop at the same spot every time?
RocRail seems to stop the train at a random place in the block, where it is to stop.
According to the RocRail manual, it seems to require a sensor of a second type in each block. And thereby, I would have to make or buy a lot more sensors and feedback modules. That has to be considered closer. And not least: The RocRail manual has to be studied closer.
Another possible source of error is the rather primitive FX decoder in my test locomotive. Maybe, I should use a proper DCC decoder?
Ultimo october 2014:
The FX decoder has been substituted by an MFX, which is also capable of “speaking” DCC. It means that I am able to program the decoder and thus make better experiments with RocRail.
And it means that I all of a sudden has got 128 speed-steps instead of just 14. Just a small piece of advice that has cost me some time to reach: Disable the FX and MFX protocols, if you have a Märklin MFX decoder and a command station as my IB-COM, which may support several protocols, but which is natively a DCC command station.
I only succeeded to read CV values 1 out of 10 times, until I realized this.
My opinions about RocRail have become quite positive. Even if I am not entirely able to sure what is happening, I have through an evenings study of the RocRail manual, reading about blocks, routes and locomotives and by setting both brake and acceleration delay in the decoder to zero, become somewhat wiser. My locomotive is making some unnatural moves with the zero-delys. But I can now see, what happens:
RocRail uses 3 different speeds, that can be set in the locomotive property dialog box. I have configured these speeds as km/h, because I think that gives better possibilities to adjust different locomotives (once I get to have more than one on the layout) to stop exactly where I want them to stop at the platform.
After setting the speeds, it is also possible to configure which speed to use where. This is done in the block property dialog box.
I have however not yet found out how to make a locomotive start with anything else than cruising speed.
But I have reached apoint, where it is reasonably predictable where in a given block the locomotive stops. And that is still with only one sensor per block, i.e. A current sensor for the entire block length.
Speed Curve set-up:
The next thing is to adjust the speed curve in my BR216 locomotive, so that the real speed of the locomotive matches the speed RocRail thinks it runs at.
By doing the same thing with all ones locomotives and by using the same speed for all locomotives in the blocks where they are to stop, I think that I can get all locomotives to stop the on the exact same spot in a block.
The same benefit may be achievable by applying specific delays for each locomotive corresponding to the speed of the locomotives. But for now I will go with the speed curves and make all speedometers of my locomotives equal.
Data for a full-scale BR216 locomotive at DB is a max. speed of 120 km/h and a march speed of 80 km/h. So that is what my little train is going to be set up to as well.
At the last page, one can read the good advice that this can be controlled by letting the locomotive run at lowest speed, stop it by blocking it with a finger, making sure that the wheels spins with unchanged speed, remove the finger and controlling that the wheels are still turning with the same speed. If the speed changes at any time, something needs adjusting.
My BR216 seems to behave just as it should.
But the speed curve adjustments are not quite as easy as one should think:
The speed measurements in RocRail are working easily and gives fairly consistent values for the same speedstep- at least at lower speeds. And I decided not to spend more time on the recipe on BEMF from tonystrains.
The hint about stopping the locomotive with my finger seems to tell that the motor regulation already works reasonably well.
But a certain value in CV 67-94 does NOT seem to mean a certain speed in the corresponding speed step. That was however how I understood the text in dccwiki.
The speed table in my decoder (CV 67-94) is now back to default values and max. speed is adjusted to 120 km/h utilizing the trim CVs 66 and 95. A value of 60 was suitable.
The problem is however that the throttle scale is by no means linear, i.e. That half throttle should mean half speed.
I am trying with a new calculation in Excel. This time starting with the recipe form dcc-mueller, i.e. More or less the same curve as before in CV 67-94, but now scaled so that it goes all the way up to 255 (to utilize the full range), while I use VC 66 and 95 to limit the max. speed. Not that the curve in the first case gave a linear throttle, but it seems to work well with this new approach.
With the properties of the locomotive propertis in RocRail set to 128 speedsteps, max. speed 120 km/h and display in km/h, the speeds at the throttle fits within a few percent.
So I have learnt that before a locomotive enters my layout, I shall do the following:
1. Make sure the locomotive decoder has a programmable speed table.
2. Determine the real-world max. speed and march speed of the locomotive.
3. Set the throttle to 28 speedsteps and measure tthe speed of the locomotive at all speed steps up to the real-world max. speed.
4. Read the originale values for CV 67-94.
5. Adjust CV 66 and 95, so that the locomotive runs at its real-world max. speed at full throttle.
6. Use a spreadsheet to calculate which CV values that will give a linear speed curve and put these values into the speed table of the decoder.
7. Set up RocRail with as many speed steps as possible (i.e. 128 with a decent decoder) as well as with the locomotives real-world max. and march speeds. Use the same numbers for Vmid og Vlow for all lokomotives – for example 35 and 10.
8. Adjust the decoder to a small delay for both acceleration and braking. It cannot possibly be a good thing for the the mechanics of the locomotive that these settings are 0. I have set both (i.e. CV 3 and 4) to 2. Then at least it does not give a loud bang each time the locomotive starts and stops.
Update on point 5: I could not get it to work with my next locomotive. In stead I let CV 66 and 95 have a value of 0 and then I gave CV 67 – 94 correspondingly lower values.
Block timers and switch delay in RocRail:
By now I can get on with fiddling with timer values and other settings in the blocks, so that I can make all locomotives stop when it is all into the block, i.e. where the outgoing signal of the block is to be placed. I have read that it should be possible to obtain an accuracy of +/- 2 cm. So that is my target.
A little advice: My swithes are servo-controlled and there is no feedback about when they have obtained their new position. It means that in RocRail, I have to check both “Switch time” and “Synchronize” as well as put for example 4000 ms into “Switch time” in the Interface tab in the Switch property dialog.
This makes the train wait 4 seconds so that all switches are set before the train starts.
What is next? Sounds? More automation? Equip more locomotives with decoder? RocRail can read texts out loud. What about a loadspeaker announcement?
It should be possible according to the “Speak to me” section at this page http://wiki.rocrail.net/doku.php?id=text-en&s%5B%5D=espeak. A number of additional programs must be investigated: espeak, playwav and balabolka including the Microsoft Speech Platform. Note the links to espeak and playwav.
Or how about setting a locomotive to run automatically at a fixed route while others are running manually and even others utilizing the random automation in RocRail?
First of all, I have to more than the single locomotive. I have in fact bought one more and I have bought a conversion kit for the biggest and best of my very old Märklin locomotives to make it equipped with a DCC decoder and a 5-pole DC motor as opposed to the AC motor that it has originally. That was however the MFX decoder that i “borrowed” for the BR216.
In addition, I have a couple of old Lima locomotives. They are already equipped with DC motors. And one of them even has a collector shoe to make is suitable for 3-rail systems. So I am soon going to buy some decoders. But does it have to be the expensive solution with sound or should I buy the cheaper non-sound kind? I need to think.
I still haven’t converted my old locomotive. I also haven’t manged to get my third switch to funtion 100%. And I am less happy with RocRail than previously. It is not 110% stabile. I cannot make my train go through a block without loosing speed. So I ought to be in a bad mood. But I don’t really care. It is a hobby and not a project. There is no deadline.
It is probably done in a jiffy, if I just start to convert the locomotive.
I am confident that I am going to get the switch working properly. I have found a different firmware for the decoder, which allows to adjust the two stop positions individually. And if that is not enough, then I have already bought thinner piano wire, so that I can make built-in spring-effect, so that the servo can move all the way to the end position without breaking anything.
Note from later: The new firmware (version 3.5) have done the trick.
RocRail is worse. I have almost reached the conclusion that I will drop it and go back to JMRI or maybe I will end up buying a commercial program. See the separate page “JRMI or RocRail“.
I need another feeadback module. To do it simple, cheap and DIY, I have found S88N. I have bought a few printed circuit boards and a mini drill in order to drill holes in them. See separate page about that. I don’t need more feedback modules for the test oval, but I will when I am beginning to build a real layout.
I already have plans to expand the test oval. I just need to extend the base board half a meter, which might give me an opportunity to try to simulate a modular layout. More to follow.
Plan for extension of prototype oval (made in Scarm).
We are now into 2015 and the Christmas holidays are over. But for once, I have had a vacation. A real vacation with a lot of model train time. My wife is studying for her exams. So I have been able to spend half and whole days. The victories are multiple:
1. I have made decoder programming from JMRI work through IB-COM and IntelliBox II in close cooperation with a vertain mister Alain Le Marchand from somewhere in France.
2. At the same time, I have sneaked other corrections into JMRI: Control of turnouts via IB-COM / Intellibox II as well as an earlier patch for feedback from IB-COM / Intellibox II to JMRI, that by mistake only was implemented for Intellibox I.
3. I have done a small quick test with scripts in JMRI, to be exact an adapted version of BackAndForth.py.
4. I have built an S88-N-P and an S88-N module. Both works.
5. I have converted my old Märklin 3060 locomotive to DCC / digital.
6. I have been experimenting with my infrared diodes / photo transistor pairs.
7. I have made better and more specific plans for the extension of my prototype layout.
Ad. 1 and 2: The weekend before Christmas was used to implement as much decoder programming in JMRI as I could read from the RocRail source code. IT was enough to get “hole through”. I committed it as a patch and very fast got feedback from Bob Jacobsen (the perhaps most active person in JMRI) and from Alain Le Marchand.
Bob immediately implemented my patch and improved it regarding fit into the JMRI code base. In addition, he asked me back, why I had not enabled more ways of programming in JMRI than I had – for example PoM (Programming on Main), + wrote how I could enable that. According to my knowledge, IB-COM and thereby (I thought) Intellibox II does not support PoM. But Alain could inform me that at least Intellibox II does support PoM. It has however been proven true that IB-COM cannot do PoM.
During Christmas (while I was visiting my family in Jutland) Alain did some experiments, where he via the keys on his Intellibox II and using the LocoNEt monitor in JMRI produced documentation regarding which LocoNet messages that correspond to PoM programming. Besides, he tested my programming track programming. We had a lively conversation via e-mail and I could sit 100’s of kilometers away from my IB-COM and my PC and just using an iPad reach almost full understanding of these LocoNet messages.
Monday after Christmas and most of the Tuesday and Wednesday went with both getting PoM to work and to find out that programming track programming is not only one thing: There are three modes (direct byte, register and ???????), which have each their sub-command in LocoNet. I still don’t know what the difference is, but I somehow think register mode is for old decoders.
It was all quite a fun process. And it was a good and memorable cooperation with Alain, who was sending outputs from LocoNet Monitor, tested my changes and ended up committing it all into the JMRI code base. Alain is a registered JMRI developer even though he is not exactly an expert when it comes to Java. Alain was however simultaneously implementing support for F9 – F28 for both Intellibox I and II. A topic that I did not participate in, but where Alain did the ground work and Bob finished.
Ad. 3: There was not much time for Jython code. I hav not been writing a single line. But I did manage to find an hour or two to try out existing scripts. Generally it works great. I both made it sound the horn and run my BR216 back and forth between two sensors.
When I decide to do more, I guess I have to start by deciding what I want to achieve, i.e. To write a requirement specification. At this point, it is not quite clear to me what I want. Will I make something for my specific layout or shall it be generally usable? In the latter case, shall I invent my own data format to describe my layout or shall I use what already exists in JMRI? Shall my program run trains at random or according to schedules? How shall the program handle when I run a train manually? At least, the program must keep track of all trains and update their position on the layout (contrary to RocRail that only keeps track of the trains that RocRail is running).
Ad 4: The day before new years evening, new years day and part of Friday, I was building an S88-N and especially the S88-N-P module. “Especially” because it took very long time to design and implement a veroboard layout and finally measure everything through with a multimeter before inserting the various integrated circuits. There were only two problems before everything worked: There was one place on the veroboard, where I had forgotten to disconnect (which I found out using the multimeter), and I had a bit of trouble programming the PICs. See more information under “Feedback modules”.
Ad 5: Saturday before new year was the absolute last opening day at Spor23 alias Taastrup Togcenter. And I was there to buy ESU LokPilot 4.0 decoders for my old Märklin locomotive and my Lima MR train. IT wasn’t exactly a sale. I spent 50 kroner more a piece than I would have at LokDoc. But I could go ahead with the rebuild right away: It did not take many minutes to disassemble the Märklin locomotive and throw the gearbox in a glass of terpentine to dissolve all old oil etc.. The biggest problem was to find the two screws that was holding the motor together. It was ccovered in dirt. For information: They are placed in the upper right and lower left corners.
It took a little longer to place an LED instead of the original bulb. But if I shall do it again, it will be much faster: A 5 mm LED fits in the hole where the bulb was sitting, and shall just be fixed with a drop of glue and then be equipped with a 1 kohm resistor.
Sunday (the last day before going back to work) I lubricated the gearbox with a drop of new oil and assembled the motor with a new magnet and a new front. It did not take many seconds. All parts were included in the Märklin conversion kit I bought in the spring of 2014. A 21-poled print for mounting the decoder came from an MFX decoder kit that I bought at the same time. The MFX decoder itself has been sitting in the BR216 for quite a while.
There are quite many wires on such a print. But I removed the ones that I didn’t need. Soldering the ones I actually needed and fixing the decoder print took a little time because I had never tried it before. But really, the whole thing is quite easy to do and took less than an hour. And another success was reality: The locomotive runs fine. The LED lights With a very white tone. But that is actually quite nice. It is no way blue. Just different from the old bulb that I am used to. But they are on the other hand probably too yellow.
The LokPilot 4.0 decoder proved to work far better on the programming track than the Märklin MFX decoder in mu BR216 locomotive. The Märklin decoder is quite impossible to program until MFX has been disabled. But there are no problems whatsoever with the LokPilot. That is except for the missing mention in the manual that the CVs controlling how light and AUX outputs shall function are only available if you write the value 16 in CV 31 and 0 in CV 32. Bat that doesn’t matter much, if you program from JMRI: It knows LocPilot and these kinds of peculiarities, so one shall just select the right pane and let it read all the decoders settings and then change whatever one wants changed (via checkboxes etc. with good labels instead of CV numbers) and finally write the changes back to the decoder. Et voila: My Santa Fe Locomotive does not light as brightly, dims the light when stopping and finally it has a more realistic max. speed. It could go at least 200 km/h, which is not suitable for a locomotive from 1950. And all changes are now stored inside JMRI as a backup.
Ad. 6: Sunday also gave a little time to play with the CNY 37, which is a little plastic thing with an IR diode and a photo transistor – one in each side and with an air gap between them. I calculated a resistor for the IR diod at 100 ohm, but decided to use 330 ohm. It works well.
Ad. 7: In between – especially during the evenings – I managed to make a list of track etc. that I need to buy plus I made a plan for how to fix the 55 cm extension board to the existing board.
I would like to summarize what I have learned about electronics per. autumn 2016. In addition, I will summarize and / or give a little more detail about the part of the electronics that I have built. The description is held up-to-date – also after 2016.
Command Station
The command station is the “control panel”. In the old analog days, there was a transformer with a button that could be rotated to determine how fast the train should run. In addition, there were some buttons for controlling turnouts, signals, etc. next to it:
This and much more is now built into the command station:
It is important to determine:
If the command station should be able to work with a PC program to control the layout.
If the command station is to be used without a PC.
If the command station should be used with an additional throttle. See an example here.
If the command station should be able to be used from an iPad and / or smartphone. If nothing else, you can use these devices to access JMRI, which again can control the command station – provided that the command station has some kind of PC interface.
Which types of decoders should be used (DCC, M4/MFX, FX, Delta, Seletrix etc.)
Which interface types should be supported, for example for feedback modules, extra throttles, other command stations, etc. It may, for example, be LocoNet, S88 (only feedback), ECoSLink, CBus, etc. However, do not overdo the importance of this interface. As long as you’ve just considered the choice of the combination of feedback modules and command station.
I have ended up having two command stations:
IB-COM, which only controls the “decoration” on the track, i.e. signals as well as other moving figures, lights in houses and streets and roads, etc. Bought because I thought I would only use it via the PC.
ECOS, which controls all the critical, i.e. first and foremost locomotives, turnouts and feedback. Bought because I found it to be very nice to use it both with and without PC.
Locomotive Decoders
Having a digital layout also means that locomotives must have a computer on board that can “talk” with the command station about how fast the locomotive is going to drive and in which direction. In addition, which light has to be switched on, which sounds to be activated, etc. On the other hand, people using the Märklin / AC / 3-rail system saves the direction switch. A good locomotive decoder costs in the order of 250 kroner (though a lot more expensive if it is to be with sound).
Depending on the choice of command station, you can force yourself to only being able to use one decoder type or give yourself the freedom to mix for example Märklin MFX, Märklin FX and DCC decoders.
I.e. if you want to use Märklin locomotives without changing the original decoders, you must acquire a command station that is not limited to running DCC only. Both of my command stations have multi-protocol capabilities.
MFX is also called M4. It is the ESU name for the decoder type that they have to use, because even though it was originally an ESU invention, it was ordered by Märklin, which therefore has the rights to the MFX name. A third name for MFX is “Märklin / Motorola neu”.
As far as I can find out, FX is the same as “Märklin Delta”. (However, you can not put the address through the digital station, but need to set switches inside the locomotive – I think. I do not own a Delta decoder). And a third name is “Märklin / Motorola alt”.
I have tried both FX, MFX and several manufacturers’ DCC decoders (Märklin, Zimo, Lenz and ESU). And my conclusion is that FX decoders are not good enough. And far from all DCC decoders are equally good.
The main differences between decoders are how well they can control a motor (i.e., how slowly a locomotive can drive) and how stable they are to control lights, etc. I have for example a train set, where the function decoder in the steering wagon lives its own life regarding the light.
If I have the option, I will always choose ESU LokPilot or LokSound DCC decoders of the latest model. As a rule, you cannot choose, because there is a certain type of decoder in the locomotives you buy.
Unless you have extra money to replace the original-mounted decoder, or if you buy an old locomotive without a decoder, you can convert yourself.
In principle, you can build a decoder for a locomotive yourself. But I don’t think it will ever be very good. And an ESU decoder is not that expensive.
Turnout Motor
There is nothing new in turnout motors. They were also present in the old analog days, if one wanted to control turnouts remotely.
But especially with computer control, one need to make all turnouts digital, i.e. equip them with both motor and decoder.
The easy choice is of course to use the motors that are delivered from the producer of the turnouts. In that case, I should use Märklin motors, since I use Märklin track. But I don’t, since they are expensive and because they switch with a loud CLACK sound.
Viessman produces a slow-moving motor without the CLACK sound. But it is even more expensive.
Not so with a mini servo. When I wrote this, the price was 25 kroner at NiceLED. The one at the picture below is a bit more expensive (but still very cheap compared to Märklin or Viessmann) model from rc-netbutik. Both can be acquired at lower prices from China. But I have been unwilling to buy outside my own country and pay more for delivery and miss the right of complaint just to save 10 kroner per servo.
That was until I discovered ali-express.com. It takes some time. But the servos are delivered free of charge. A servo costs less than a Euro.
I would claim that the total price for drives and decoders per. turnout is approx. 10 kroner with cheapest servo and home-built decoder, 300 kroner for original Märklin and 350 for Viessman driven. The latter two can be even more expensive if you are not careful when choosing dealer. Multiply with the number of turnouts. Then it starts tearing a bit in the credit card, right?
Using a piece of 0,6 mm piano wire, a servo can be mounted on most turnouts. Except for Märklin M track (the old steel track). Here is how I mount servos on Märklin C track:
Turnout, motor and decoder.
DIY Electronics in General
I have been building parts of the electronics myself. You can do that too. But you don’t need to if you don’t want to. Or you can choose to do something in between. Any combination of DIY and buying professional electronics exist. You may even produce your own PCBs (Printed Circuit Boards). Or you can do as I do and use strip-boards:
Most of the construction I will describe below are based on micro controllers of the PIC family. It is in principles tiny computers built as a small IC (Integrated Circuit) – also called a “chip”.
Don’t be frightened: They are really cheap and others have already written the program that shall run in the PIC.
12F629, that I use in servo decoders and signal decoders is an 8-pin IC. It is priced at about a Euro if bought in Europe. A few additional components are needed, but there is still plenty of money saved compared to buying a professional decoder for example an ESU that cost 220 kroner.
One investment is however the PIC programmer that is needed in order to transfer a program fetched somewhere on the Internet to the PIC. That is unless you buy a kit where the PIC has already been programmed. You can do so for example at litra.dk. A PIC programmer costs 275 kroner and you will also need a proper socket to hold the PIC while it is programmed. It is priced at 200 kroner at Reichelt. Both can of course be bought at a fraction of that price from aliexpress.com.
The PicKit2 software can be downloaded free of charge from Microchip, who produces the PIC micro controllers. PicKit2 is both a compiler that can translate assembler source code to HEX files (enabling changing the program code) and software that can download the HEX files to PIC controllers.
A few hand tools are necessary too.
First and foremost, a soldering station is needed. With a thermostat and a thin long-life tip. It pays to buy something really good. Such as a Weller soldering station. And remember a big roll of lead-free thin solder. Do not buy anything with lead in it. It damages your health. Our hobby should not kill us.
A desoldering pump is handy when you make mistakes or if you need to repair or dismantle. And they can be bought really cheap.
A multimeter is also a must, so that you can measure voltages and look for short circuits or missing connections. Very precise and costly models are available, but you can probably get far with a fairly cheap device.
If you love gadgets, you may get poor by buying power supplies, oscilloscopes, signal generators and so on. But you don’t really need it.
Regarding oscilloscope, I have bought a very cheap device in 2018. It has a very limited bandwidth, but is suitable for DCC signals, which are quite low frequency anyway.
And of course, anybody will need pliers, tweezers, tiny screwdrivers and so on.
It is anybodys choice to invest in tools etc. or to buy decoders from a shop. But I cannot imagine how anybody would do without a soldering station anyway. As a minimum, a lot of wires need soldering. Of course a cheaper tool may be usable for that limited purpose.
But for me, it is a big part of the fun to build the electronics and the software.
Turnout decoder
Depending on your choice ofturnout motor type, you will need different types of decoders. At ESU (just an example – there are many other vendors), the CLACK type is called SwitchPilot and the servo type SwitchPilot servo.
But I don’t feel rich enough to pay more than 200 kroner for a decoder for 4 servos / turnouts. That is why I am building Paco’s 4-servo decoder, but with an alternative firmware, that makes it possible to adjust the end stop positions individually instead of just being able to adjust the total movement. The firmware is described and can be downloaded here. Use version 3.5.
A decoder looks like this (where I have only mounted two out of the four connectors for servos). The two wires that are soldered to the board connect to the command station on the normal DCC port. Soldering wires to the board is not quite as should be. It can destroy the board, if the wires a pulled. But proper connectors come at almost the same price as the rest of the board, so I have chosen to take the risk:
If you would like to build on a proper PCB, you may find a layout at Paco’s homepage. Or the decoder can be bought as a kit or as a completed decoder at litra.dk. He has however divided the electronics in several parts – as I have also done – see below.
I have built the decoder on a stripboard as shown here:
The red dots indicate where strips are cut. The greem dots are mounting holes where the decoder is screwed to the layout. The two green lines are connections to the command station / the tracks.
When I added turnout number 20, ECOS seized to be able to supply enough current during startup. A servo uses about 200 mA when moving. And usually only one servo at a time moves. But when ECOS is turned on, all servos are moving slightly. And that made ECOS switch off again to protect itself.
That is why I have changed my decoders to use a separate power supply. I have bought a 5V / 10A power supply from China. And I have modified the decoders by removing the power supply part:
That requires an adapter to transform the DCC signal from +/- 17V to 0 / 5V:And it also requires a separate programming interface, that can be used to supply the particular decoder that is being programmed from the programming track. It is simply the components that I have removed from the decoders:
Feedback Modules
In the analog world, feedback is not needed. But in order to control model trains from a computer, the computer need to be able to keep track of where the trains are. I.e. feedback modules supply the command station and thereby the PC – or in some cases the PC directly – with that kind of information.
I have settled on S88-N modules as describe here. See the last half of that page.
Ready-made S88 modules are available from both Märklin and ESU. But they are not S88-N. S88-N are supposed to be more stable than S88. I have no personal experiences with S88 modules. But I have read abou people having problems – maybe due to long cables. ESU also have ECoSDetector modules with built-in current sensors. They fit to the ECOS, but are not S88 modules. All of them are however extremely expensive and not at all fitting my budget.
I also have no experience with ready-made S88-N modules. But I have seen that both NiceLed and nettog.dk have some from a company called Digikejs. And they are cheap enough that I might cosider them, if I had to start over. Even homemade modules are not entirely free and it easily takes an entire day to build a module with 16 current sensors and an S88-N module. So anybody must consider if it is fun to DIY or if one would rather pay a couple of hundreds of kroner extra to get some ready-made modules.
The module that I link to include current sensors. Same module also exists in a version without current sensors. And both exist in LocoNet versions instead of S88-N.
The module I have been building is inspired from the work of Sven Brandt. The HEX file can be downloadet from his website. OR you can buy the module as a kit from him.
I have bought the PCBs and the SMD components from litra.dk. He can also sell a ready-made module. Or you may go totally DIY and build the module on a strip board. He can also provide current sensors, but on a separate board.
Note that litra.dk uses S88 and not S88-N on his own layout. His S88 system includes a separate S88 interface that via an RS232 interface (which is not standard on modern PCs) connects to the PC and not the command station. That module cannot be used for S88-N.
But the S88-N-P module from Sven Brandt, that I have built in a simplified version on a strip-board as decribed here, can. The S88 connector towrds the command station can be seen to the top left and the S88-N connector towards the S88-N modules (phisically the same connector as used in EtherNet / LAN) to the lower right:
It looks as if the Digikejs modules can connect directly to the S88 port in the command station. But then I do not suppose there is any galvanic separation to protect the command station.
Sensors
The sensors are attached to the feedback modules. They sense where there are trains on the layout. My sensors are current sensors, i.e. the sense if current is flowing through a wire. But there are also other types of sensors.
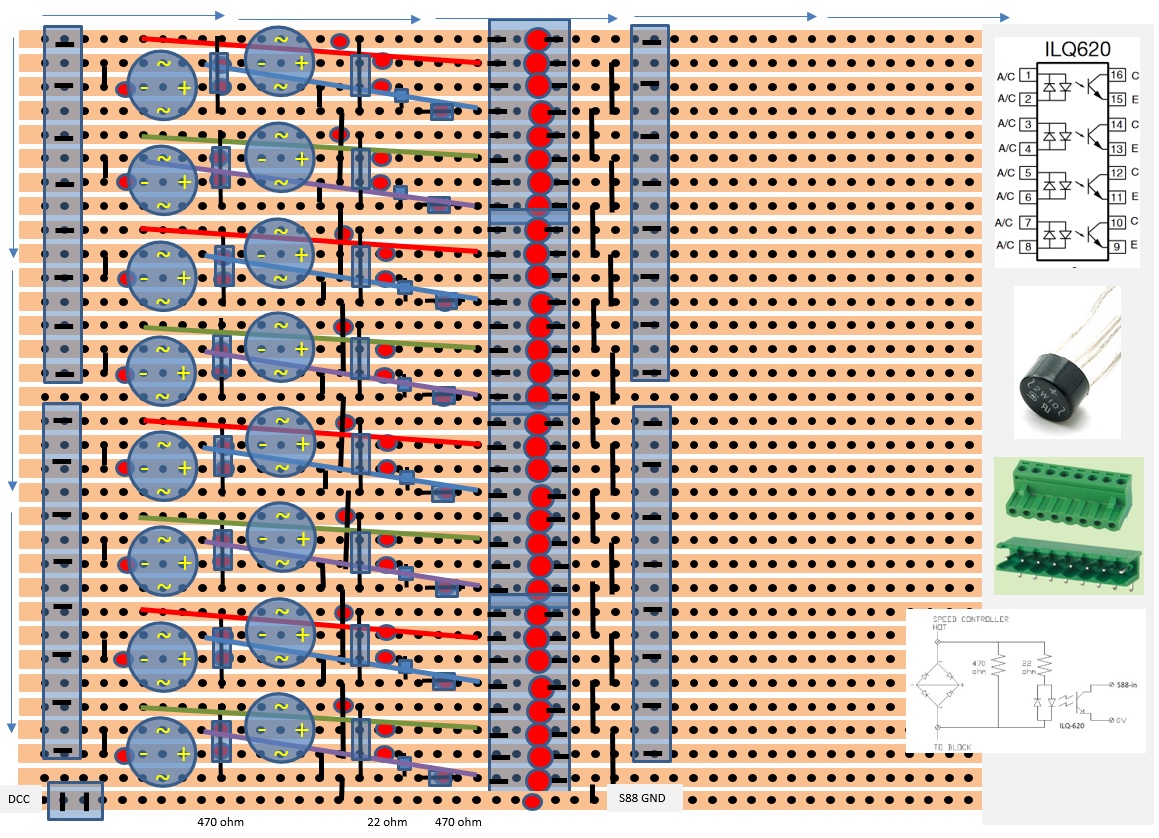
As described several places on these pages, I am connecting each block to the command station via a current sensor, that is built as follows (minus the capacitor that is unnecessary if particular kinds of optocouplers are used – see below):
I have found out that the optocoupler can be protected by using a larger resistor. 20 ohm is no problem. I have also changed optocouplers from 4N25 to CNY17/IV, which have a better amplification.
I am building 16 sensors on a strip board and mounting an S88-N module to the same strip board. The picture shows my original 16-sensor board with an Uhlenbrock LocoNet feedback module:
or with an S88-N module:
Late 2017, I have changed to a new type of sensor, where I use a different type of optocoupler as well as a bridge rectifier instead of discrete diodes:The output of current sensors based on ordinary optocouplers such as 4N25 or CNY17 is almost a square signal of 0 / 5V. And consequently, it is rather by luck if that is interpreted as a 1 by the S88 module. However, the DCC signal is not symmetric. And that can be utilized by turning the IR-diode in the optocoupler upside down corresponding to the diagram above (i.e. pin one connected to the block and pin 2 to DCC). That has proven to work. I am still using my old current sensors after having modified them as this. See my pages from medio December 2017.
ILQ620 detects current in both directions, which means the output is almost like a clean DC.
Decoder for signals
This kind of decoder can of course also be bought ready made. See for example SignalPilot from ESU. But once again, I prefer to save some money and make my own decoders.
I am using the same power supply and DCC adapter as described for the servo / turnout decoders. In fact the signal decoder hardware is almost identical to the servo decoders. Only difference is that the connecters for servos are substituted by a resistor for the LEDs in the signals. I.e. the decoders consist only of the PIC and the two resistors R1 and R2. This picture is of my first working prototype:
The firmware is different, but also from Paco. See his description here. And also see the description at litra.dk. Note that I am not using any kind of driver for the signals. I am using the PIC outputs directly. I can do that because each output only need to drive one or two LEDs. See more on my page my page about signals. Also see at the same page, how I am using three NAND gates, i.e. a chip with four NAND gates to make the two green LEDs in some signals to function correctly. For these signals, I am using one full decoder to control the four LEDs in the main signal and 1/4 of another decoder + the NAND gates to control the fifth LED.
I have been programming the prototype decoders by setting the default CV values in the source code (the ASM file) and thus generate a separate HEX file for each decoder. But since then, I have been building the programming interface described above for the servo decoders. And that interface can also be used to set CV values in signal decoders.
Signals
I have not yet built a signal for my layout. I have however been building a few prototypes. See this description.
But next time, I am going to do it better See this description. I am no longer afraid to use lacquered copper wire. It is stronger than you would think and surprisingly easy to work with.
Cabling
With two comman station, a lot of decoders for turnouts and signals, feedback modules etc. and when each decoder should be switchable between normal DCC and the programming track output – including the decoders in locomotives, cabling is not as trivial as connection the green and the red wire from the command station to the tracks.
I have a number of switches to choose what should be in normal mode and what should be in programming mode and from which of the two command stations:
As it can be seen, my first thought were that signal decoders should not be programmed at all.
With my first real layout, it was no longer feasible with a switch per decoder. Consequently, the switches were substituted by a patch panel, where I can move a connector for the decoder that should be connected to rhe programming track output of the ECOS. IB-COM programming is no longer needed, since JMRI can now also program through ECOS:
After having introduced the separate power supply and programming interface for decoders, the patch-panel is barely necessary. But I have it now, so I will keep it.
It’s good to make plans. And I have plans both in the long run and for the season that will start soon.
Long Run – Layout
For the long run, plans for a larger layout are in progress. Jørnebanen is still the great inspiration. I haven’t got room for his new layout, jornebanen.dk. But the old kamstrupvej.dk might be pushed in. However, I would like a road to my Faller car, and my houses must be in a completely different style. And I wonder if I am able to divide the layout into for example four detachable parts, so I will be able to build details and make various repairs in smaller pieces?
Besides the inspiration from Jørnebanen, I also wonder if I have to let the layout consist of Aarhus H at the crossroads of the visible part of the track and let a reversal stretch over a shelf along the wall and around a corner and down under a desk and let the other end of the railway station disappear below to a shadow yard? A shadow yard is perhaps very good, but doesn’t it become a little tame with just a big railway station as the center piece?
Short Run – Layout
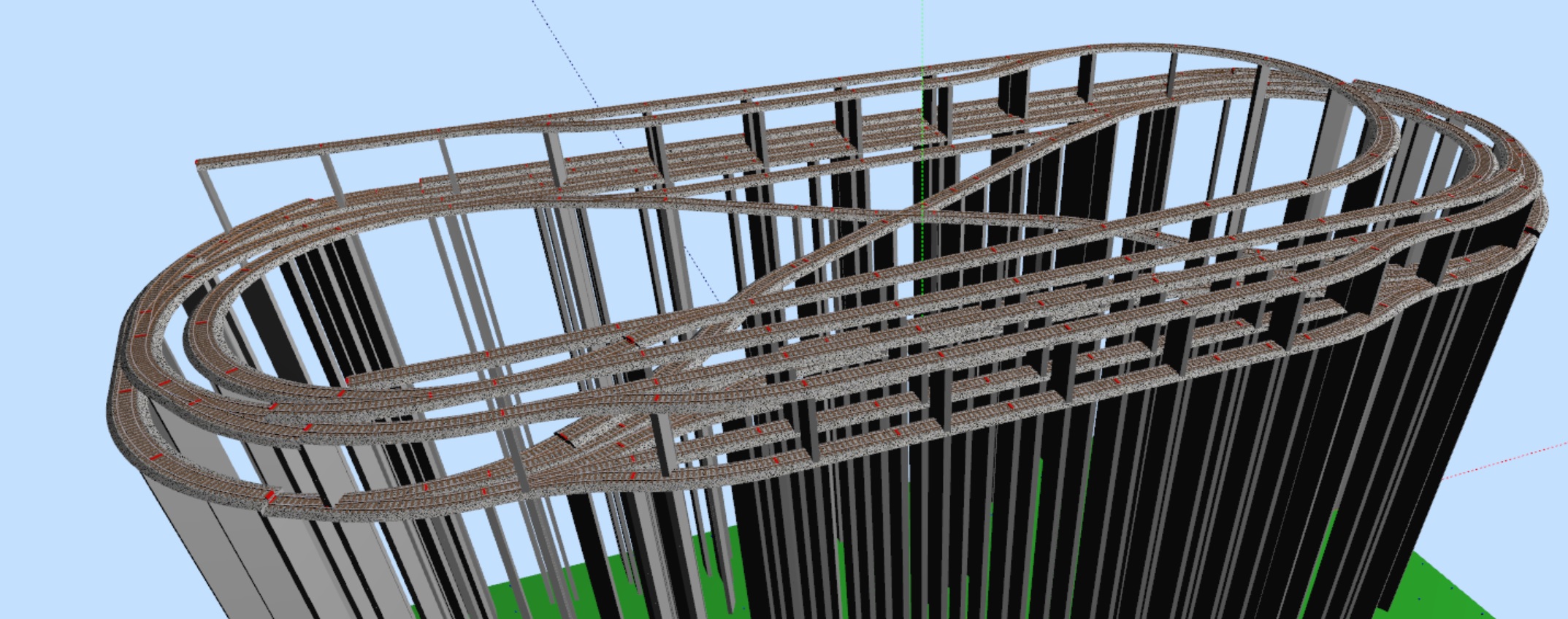
But a new layout will not be in the coming season. I’m not done making prototypes. However, it may be that I extend my prototype with an upper floor, and also do some prototyping regarding modularization. It’s something with 25 pole connectors, cutting rails and something that is accurate enough for the trains to cross the borderline between modules.
When building several floors, I have to figure out how much slope I dare to make on the rails. For example, if I will have a maximum of 2% slope and there must be a 10 cm level difference (trains and rails are about 6 cm, and there must also be room for little plywood and a servo or a wire that sticks beneath the upper floors) 10 cm * 100/2 = 5 meter rail.
A half circle with R1 curved rails is only pi times 360 mm or approx. 1.13 meters. In reality, slopes above 1.8% are only for mountain railroads. But model trains has so far I can read no problems with 2%. You can also go up higher – especially on a straight line, where you could go up to 5%.
New calculation: Let’s use 9 mm plywood and thereby get down to 8 cm level difference. At 3% there is a need for 2.7 meters. At 4% 2 meters. But it is still very much for a small layout. It takes a lot of trial and error and it certainly also requires that where two levels are to cross each other, one level must be “on the way down” and the other “on the way up”.
It is probably not entirely coincidental that kamstrupvej.dk operates with both basement, ground level and first floor. It’s actually half floors, that is, for example 4 or 5 cm level difference. And as far as I can see, he uses almost 3/4 circle to come up or down, i.e. about 1.6 meter rail. At 4 cm level difference, it gives 2.5%. At 5 cm it is just over 3%.
But now I am again thinking long run. I’d better stick to making a single stretch with adjustable slope – both a straight and an arc. Maybe just let a siding have the slope? It must be easily possible using Woodland Scenic stuff: http://lokdoc.dk/risers-420
Time and Place
I have determined that the time is 1987 +/- 5 years, though with a single steam-driven museum train.
The place is Denmark, however, with the visit of another museum item, my old American Santa Fe train.
And of course, there is also the Skive Vestsalling Railway, for which I have a tiny train (“rail bus”) and where I both intend to build Spøttrup castle and Spøttrup station. It was shut demolished in 1966, but has to be brought to life again on my layout.
Desirable Rolling Stock
As mentioned, my layout is Danish, anno approx. 1987. That is, I can use the following rolling stock:
Green and/or red/black MH/MT for switching and freight trains.
Red/black ME/MY/MX/MZ for especially intercity trains, but they can also be used in other passenger trains as well as freight trains.
Red MR/MRD. The MR train was not painted white until 1995 or later. And the blue/grey IC3 and MR tog was in the mid 0-es.
Red MA (without wings on the front, but with white DSB logo – was painted silver in 1984. But he red one looks better)
A and B wagons as well as a single Ag, which were in use in intercity trains way up into the 1990-ies
The white IC3 train, which was delivered in 1989/1990
Freight trains is not my big thing. But I suppose I will need a freight train anno 1987 at some point in time.
And maybe some older wagons -preferably passenger wagons, so that my litra N steam locomotive can get something to haul. It was a freight locomotive while it was in use. But if there had been preserved one of them, it would probably be used for passenger trains as well.
Short Run – Software
In the short term, I will declare my Signal Controlled Warrants, which I implemented in JMRI in the 15/16 season, a success, and therefore not make more control software.
On the other hand, I need to do something about the locomotive sounds, which in a sense are also part of JMRI. In addition to writing some documentation for the file format with the sounds for virtual sound decoder, I’m going to add sounds for my MH locomotive and maybe also to the MR train. Santa Fe and BR216 can do with the existing JMRI sounds so far.
The problem is to obtain sounds without violating anyone’s rights. It has to be worked on. The sounds should consist of engine noise at different speeds and the transitions both during positive and negative acceleration. And in addition, for example screeching brakes, door noise, station messages, etc. Motor noise is the biggest problem. The other sounds are available online in editions that anyone can freely use.
Short Run – Model Building
And then there are my signals, where I’m not completely satisfied with the prototype I made in 15/16. I’m going to try again with a more realistic mast, thin copper wire down the mast and the ugly resistors away from the back of the signal head.
If I get my Faller car to run? Time will tell. It depends if I come so far that I get a road built.
First and foremost, the season is about model building. I want to build houses of paper. First, any of the houses that can be downloaded at http://www.solvangprivatbane.dk/ and then a house of my own design.
The procedure can be read on modelbane-piger.dk, from which I also bought a CD-ROM with a little more than that on their website. I need some materials:
– Cardboard / cardboard of 1.5 mm. Already purchased in Bog & Ide.
– Some glue to glue printed facades, etc. on the cardboard. First try done with a UHU Photo Stick (an acid-free adhesive stick) purchased from Bog & Ide.
– Plain white glue to glue the different parts of the house together. However, Witzel’s hobby suggests something different in their construction manuals.
– A scalpel and a cutting pad. The wife claims that we have that already. Modelbane-piger suggest a hobby knife.
– Steel ruler to guide the knofe while cutting.
– Corrugated cardboard with 2 mm waves. I will look at Panduro Hobby.
– Some watercolor paint (tempera blocks) to paint roof. The lady claims we have it. Otherwise, it will be Panduro.
– Matt spray lacquer to make printouts or watercolor paint more stable.
– Color samples on ordinary wall paint if something is to be totally smeared into paint.
– Clear plastic or PVC sheet 0.2 – 0.3 mm for window glass. It can be purchased at modelskibet.dk.
– Wood or plastic strips of 1 x 1 mm corresponding to 10 x 10 cm (exactly 8.7 cm) bars in real life. Maybe 1.5 x 1.5 mm, corresponding to 13 x 13 cm in fact. Modelskibet.dk is probably the best bid.
– Water sticks or straws (halved to become gutters). Otherwise, steel profiles can be purchased at modelskibet.dk.
– Pin copper wire (from wire) such as handrails, drain pipes, etc.
– Strange little things.
– Jørnebanen makes a nice sidewalk. For this purpose, plastic card and cobblestone are used, which may also be this one.
– Asphalt should be possible to make out of black sandpaper. But it will probably ruin the Faller cars. A smooth painted surface is probably more to “their liking”.
Next, I want to build the house I live in. And it must be including the garden, the driveway, the greenhouse, the furnishing inside the house, lights, etc. etc. The model train will not be able to drive, but there may nevertheless be one around the Christmas tree.
In addition to the houses, a number of different surfaces, such as pavement, gravel, road etc must be made.
And I want both rust and ballast on a small part of my rails. I bought a little bag of ballast, but I am still lacking paint. And I’ll probably also use a Roco track cleaning block http://lokdoc.dk/roco-185/roco-10915-p1675
In addition, there must be grass. I want to convert an electric flie swatter into a Grassmaster and “sow” some Noch grass.
I guess that is plenty of plans for a single season…………
And yet…..
Maybe I should start all over again. Why not make an almost-copy of kamstrupvej.dk. It can almost be in the same space as my prototype layout. It must be built on a frame, but with the top divided into modules like the city and / or the mountain on jornebanen.dk. Perhaps consideration should be given to having another basement level with a further reversal loop or the like. I must be able to reach all non-visible rails from below, so it must be considered very carefully.
If you “flip the drawing out” so it’s not on several floors, you can better see the principle. The orange is the mountain range, i.e. top floor. The white bottom is the “ground plane”, and then you move downwards through the top white and further down to the blue:
Or in 3 dimensions:
The visible part of the layout looks like this (though it may not be completely symmetrical – maybe the rails should disappear into a viaduct or the like on one side?):
It should accommodate a couple of cities, a country road (to the Faller car) and some fields, lakes, a campground etc. But it is not yet designed.
October 2016:
October 6
I have begun building a house. That is, I have scaled up and printed a guardhouse from solvangprivatbane.dk and cut and glued the walls on the cardboard. And then my efforts are until further halted.
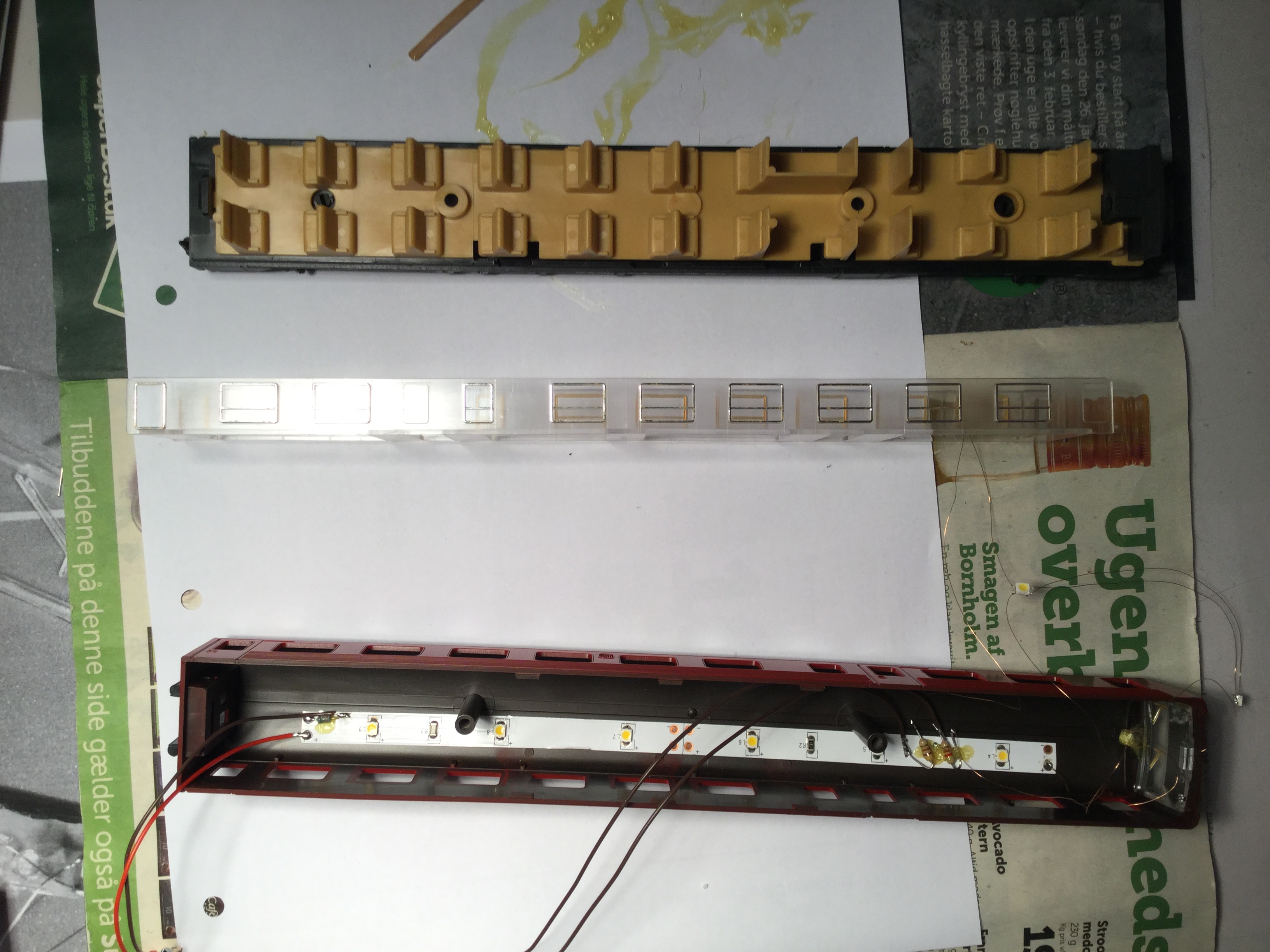
In addition, I have been shopping for the conversion of my Lima MR train: Last year I bought both an ESU LokPilot v.4, fine LEDs from NiceLED.dk (for front and rear lights), LED strips for ceiling lights in Jem & Fix etc.. I also have lacquered copper wire, relatively thin wire and more. And now I have also bought a NEM652 plug with a wire harnish, so everything should be ready. Hopefully there will be time in the coming weekend.
October 9
The Lima MR conversion is on it’s way:
I need to get the glue dry in the locomotive so I can get it screwed together.
The other wagon is not yet disassembled. But the LEDs to go into the wagon are almost ready. Only a few wires need to be soldered. And then the diodes must be glued and the wagon will be reassembled.
October 11
MR (locomotive part) conversion done:
MR train with ESU decoder, red/white light and indoor light as well.
Now I only need to finish the light in MRD (the other part of the train).
October 14
The MRD is done except for the two lower LEDs, which are not yet glued. Tomorrow it is Saturday and the greenhouse must be emptied for tomato plants. So there will not be a lot of time for model trains. But I guess I might be able to do the last bits on the MRD Sunday.
It’s not progressing very well, because I have to steal 1/2 hour here and there. There is much else to do with work, greenhouses, etc.
But now I’m building train rather than electronics. Soon it will be houses and countryside. It will be real model building.
I am also having the guard house. It smells even more of “real” model train.
October 16
The MR tain is done and another weekend has passed – mostly with greenhouse, cleaning etc.
In addition to the completion of MR, I have also been cutting the first outer wall for the guardhouse. I am in doubt as to whether the solvangprivatbane recipe is correct. I’m somewhat nervous that I end up with some very ugly corners. Modelbane-piger write that the brick paper must go a cardboards width beyond the cardboard so that it covers the corner of the house. It seems correct. But it’s not going to happen the way I’ve started now. However, it’s not too late to change the method, so I think I’m skipping the Modelbane-piger recipe and cutting out the paper pieces first, then lining with paper and then collecting.
October 17
And now back to wagons: I also have some B wagons from Lima that need some light. It is easy enough, according to digitaltog.dk. Or maybe it’s a little over-interpreted. Now I have ordered even thinner (0.04 mm2) wire, smaller plugs and a function decoder from niceled.dk. And in addition, I’ve previously bought a pair of (Märklin) collector shoes and (noname) powerups from lokdok.dk. Then we need to see how it works. If everything is well, the MR train will also get the thinner wires and smaller connectors.
Regarding the B wagons, it is my intent to equip one of them with collector shoe, tail light and interior light. The next wagon will only get the interior light, and I will use a thin wire and tiny connectors to get power from the first wagon to the next.
I use the Lima B wagons because they can be purchased in large amounts for small sums. Not because I will in the long run use them. In contrast to my MR train (which is good and nice, but of course used), my B wagons are better described as well used.
If I later make a similar conversion of wagons with NEM shafts, I would probably consider using power-carrying couplings rather than wires and connectors between the wagon. Eg. Viessmann 4-pole couplings. But I do not sacrifice money on equipping Lima cars with neither NEM shafts nor links.
Tonight I am just reading a bit on the Internet. Not really doing anything. But check out this Swedish homepage: http://jorgenedgar.se/kurser/x10/start.html. He makes locomotives etc. by order. And he has made a lot for himself. Among it pretty much any Danish diesel locomotive in scale N. And he makes them out of plastic and cardboard. I guess he spends a lot of time on each locomotive…
October 22
There is not going to be much model train this weekend. The goods I have ordered from NiceLED for mounting interior light in the Lima B wagons have not arrived. I suppose they are on vacation.
But I am reading (and writing) a bit on the Internet. Right now, I am reading niels-modeltog.dk and how he has built Svenstrup Station out of Heljan brick wall and roof plastic card and Auhagen details. I suppose the result is nicer than it will be, of one builds out of cardboard, where the contours in walls and roof are non-existent or wrong.
The plastic card can be ordered from Heljans homepage (delivery 85 kroner). Windows are another problem. I wonder if one should still make them out of cardboard? Or can I find some made from plastic? Locdok seem to have a good selection of windows, gutters etc. from Auhagen. But naturally that is German, which is a different style than Danish.
I am not sure how he manages to make corners, window openings as nice looking as is the case.
See also Sydvestjysk modelbaneklub from Ølgod. They have made their own cardboard houses. They have made some out of kits from Epokemodeller and they have been modifying and building Faller plastic kits.
Some day, I want to build houses from Spøttrup – the station (see this film from Spøttrup lokalhistorisk arkiv), Nymølle Teglværk (Sydvestjysk Modelbaneklub have been building something similar, a chimney is available from Faller), maybe Spøttrup Borg?
October 23
From time to time, I can act fast. So now I have ordered Faller 130507, which is a plastic kit for 2 German houses, which have to be painted to look Danish.
And the plan is to buy a bit of Heljan brick plastic card at Hobbymessen in Rødovre in two weeks. It seems a bit stupid to pay 85 kroner for delivery of a couple of cards priced at 75 kroner. Maybe I could get my local model train dealer to obtain them. But right now, it does not seem that anybody nearby keep them in stock
I.e. I will stick to my plan of building out of cardboard for concrete buildings, but brick buildings will be made out of plastic. Maybe I will do everything in plastic when it comes to it.
October 24
I was at Togdillen in Vanløse after work to buy a couple of pølsevogne (a very Danish thing) and a bit more. They have a lot of stuff that cannot be found in their web shop. For example a small selection of wood strips, brass pipes etc. And a larger selection of (very thin – 0,5 mm) profile plastic sheets, for pavement, steel roof etc.
They did not have any Heljan brick wall sheets. And I couldn’t immediately find any standard plastic sheets either. But they probably have them anyway, for I saw an Evergreen display like the one below. And I have read here, that Evergreen is the best there is:
Evergreen sheets and profiles can also be bought in the Internet in Denmark at På Sporet. However, they charge 100 kroner for delivery.
Togdillen has a lot of stuff that is no longer being produced – such as the “pølsevogne”. And they also produce some nice things themselves. For example a lot of houses from Korsbæk / Matador (a very popular TV show from the 80’ies). And they still have a few IC3 trains, that they have produced out of Heljan parts.
November 5 – Hobbymesse etc.
I was at Hobbymesse in Rødovrehallen today. It was mostly a shopping trip, where I bought the above mentioned kit from Faller with 2 houses.
Besides, I bought some plastic sheets, that are not Evergreen, but something cheaper from Witzel Hobby. We will have to see if they are any good. Otherwise I found out that Kystbanen in Charlottenlund is having he entire selection from Evergreen.
I bought the Heljan brick wall at RC Kongen, who shares address with Heljan, but is selling the products cheaper and with cheaper delivery.
I succeeded in talking with somebody from Risløv Hobby about airbrush. It is not to be used indoor, unless one has an effective suction system / painting cabin, since a fine fog of paint is spread several meters away.
In the afternoon, I was at a postage stamp exhibition in Birkerød. There I saw the 3modul.dk club with a big model train layout. I had a good chat with one of the members, which made me consider joining the club (100 kroner per year).
But more importantly, he teached me how to mount 4 LEDs in a car: Connect all 4 in series and connect them directly to a 5V power supply, such as a USB charger.
And there are two possibilities:
Either the car is equipped with head and tail lamps with “real glass”, where the LEDs can be placed behind the glass.
Or (and that is almost simpler) drill a 1 mm hole and use one of the very tiny LEDs that are bought with copper wires already attached (they are smaller than the 1 mm hole). The LED is simply put into the hole (from the inside) and attached with a drop of transparent glue that covers both the LED and the hole. The glue he uses is Micro Kristal Clear, which can be obtained from (among others) Togdillen.
He also thought that the cheapest place to buy the LEDs is at ledbaron.de. Web shop: http://stores.ebay.de/ledbaron I can see that they also has the very thin wire as well as tiny connectors. Or one can search for “LED 0402” at mouser.com.
November 17
I have just seen a strip cutter from Faller, model 907004, for not a whole lot of money here.
Beside that absolutely nothing is going on from my side. I am way to busy at work etc.
November 24
I have sold my MR tog, even though it had become quite nice and well-working with thin wires to connect the two wagons. I cleaned the wheels, lubricated the train using fat from Trix and attached new rubber “tires”. But of course, it is still a Lima train made 100% out of plastic, so I did not get that much money from it.
I hope the new owner will be happy for the train. And then I might buy a new MR/MRD train when Mck starts producing them as promised.
Besides I am “looking at” wood for my new baseframe. And I have been printing the layout in 1:1 so that I can start the build. I have not yet ordered track etc. But I plan to have the wood available so that I can start building during Christmas.
In the following I will describe the elements that I am considering at the moment for my layout. I imagine they could be placed approximately like this:
The pictures on this page are from various sources, among them Tage Falkenberg, Erik Trudsø and EVP.
Spøttrup Station
The history goes something like this: We are in 1990 and have just realized that SVJ (Skive Vestsalling Jernbane) still exists even though in real life, it disappeared in 1966, when I was 2 1/2 years old. However Spøttrup station (that use to have a rather large depot building, shown on the following pictures) has been reduced to only 2 tracks and only a fraction of the depot building.
I am considering only to build the part behind the port to the far left on the picture above. There is a better view of that part (seen from behind the building) here:
To fit the station reasonably correct I will add a small siding pointing back towards Skive, but only going into the depot building. I have no intention of building the turntable or the other tracks. It would take up to much space. See this track plan of the real Spøttrup Station:
I am not sure if I am going to build the station building itself. The real building looked (and looks) like this:
Heljan’s model of Videbæk station does of course nok look especially much like Spøttrup station. And it is (as I guess is true for all buildings from Heljan) to small. Anyway, it might as a starting point become the station building on my layout:
Since Spøttrup station is becoming a time warp, it also gives me an opportunity to have a semaphore signal. Such a signal had it’s place at Spøttrup station:
The signal had only one arm. What might look like the second arm is really a luminaire. As far as I know, one cannot buy such a Danish signal. There has over time however been people producing the arm, so that one could place that on a signal that has been produced as a German signal. My idea is to settle with a Viesmann 4500 (250 kr), which for example can be bought at Lokdoc.
The signal requires a decoder for magnetic articles. And even though I can build one myself, this might one place where I buy an ESU SwitchPilot (260 kr).
Besides, the manual states that a transformer with 14-16V 0,7A is needed. But I don’t need that. All my signals are to be controlled by the IB-COM. And that has a more than adequate power supply.
Märklin 70392 could be an alternative. But it is as expensive as both Viessmann 4500 and ESU SwitchPilot.
I could also equip one of my Paco decoders with a darlington array as a driver and different software. The darlington array is 3 kroner, and I have it already. See the diagram here, even though I would modify it to not have a separate power supply, but drive the signal directly from DCC power.
The signal should be painted so that the mast is grey and the arm red as it should be for a Danish signal. I think that would be good enough for me. The signal looks as this:
Whereas a correct Danish signal would look like this:
I do see that there should be holes in the arm, but a solid red arm is good enough for me. The German read and white piece on the mast must be cut off. And the same thing with the object near the ground which is supposed to look like an electric motor.
Besides there were no red and green lanterns on the signal in Spøttrup. But there seem to have been on other Danish signals. So either I have to add to the story that at some point in time, these lanterns were added to the signal, or I shall manage to cut them off without destroying the rest of the signal.
The real signal at Spøttrup looked like this:
Skive Station
The real Skive station looked like this on the tracks used by SVJ:
Note the signals. I intend to only implement a single PU signal at the edge of the platform towards Spøttrup.
The signals on the main tracks will be similar to those still on the same track today: I-signals with 4 lanterns and U-signals with 2. There still seems to be a PU signal with 6 lanterns towards Struer. But I think I will forget about that.
The station building looks like this:
As it can be seen, the station is built into a slope or a hillside, so that it is 4 storeys high towards the platforms and only 2 towards the parking lot.
I have bought Heljan’s version of “a modern station”, that is not in production anymore, but still available from Togdillen. It is 2 storeys both sides, but seems to be inspired by Skive station. The model is 48 cm long, which probably is not enough to be 1:87, but more than enough for my small layout. The model looks as this:
The facade towards the parking lot can be made a bit closer to reality if the DSB wings are put above the entrance instead of on the gable, which by the way shall be “clean” as in the real world.
The facade against the platforms can also be less wrong by avoiding the canopy. But the real station is 4 storeys, which the model is never going to be.
I have thought of placing the building at high enough elevation that the track to the far left towards the rear shadow station “disappears” under the station building. I don’t want to make mountains for that trick in a flat country as Denmark. And at the same time, Skive Station will reside way above the track as in real life.
I still don’t know what to do with the doors on the model in the platform side. Maybe I will paint them so they look like windows. Maybe I will make them into Venetian balconies with bars in front of them.
Likewise, I am not sure about the covered stairways down to the platforms. I may be doing something entirely different than the real world. We will see.
Other Elements
I am living in Taastrup in a house from 1997. So it has obviously no place in a landscape near Skive anno 1987 / 1962.
But I would like to challenge myself by building my own house, so I will find a place for it. Maybe in Rødding, which is the village where Spøttrup station is.
Besides, there need to be a road for my single Faller car. Maybe a circle from Skive station out through the city, crossing the rails at the end of Spøttrup station, continuing behind the railway and through Rødding, under the rails, which must then be on a bridge and back to Skive. For a bit of added fun, I could add a “turnout” in Skive leading to a parking place, where I can start and stop the car using an electro-magnet.
I would also like a lake, where I can try to make water. And then somebody can be fishing and somebody can be bathing. It will bring life to the layout.
Maybe a camping site by the lake?
It seems very modern to make a tivoli. But I don’t think I want to use space on that.
Skive Town
I am considering to build the post office as well as the square next to it. At the square there is an ice skating rink in the wintertime.And it could be fun to make ice skaters that actually move. It might be that the rest of the layout is summer while this one element is winter. But so be it.
The square could also give room for a “pølsevogn” (particular Danish kind of hotdog stand) – even though I have no recollection of such a thing from Skive at those days.
To make a complete town, there need to be more houses in Skive. But some kits from e.g. Faller would be sufficient. Even though they are German houses, some of them are somewhat similar to Danish buildings from around 1900.
Elevation
As already described, Skive station resides high above the front tracks. From there the terrain raises even higher both moving to the right and to the rear of the layout. The town of Skive is situated on this slope.
Rødding might be placed high enough to make it possible to make a road bridge across the track?
Rødding Village
Rødding consists of the station building and a few houses more.One of those house could be the one where I was born in 1963. The house is similar to house number 2 from the left on the picture below:
The was hoever only a single window in one of the gables (at the top floor).The dormer window (which is still there) is a bit wider and consists of 7 single pane windows. The windows in the facade had 6 panes like this one. There was however an arch at the top as far as I remember:
Rødding also had an ice cream parlor selling Grotte ice cream. It was not this one, but it probably looked similar:
The church is almost next to the station – opposite the village. I will not build the church right away, but it can become a fun challenge at a later stage with it’s varying building materials from different ages and with the pointed roof on the tower:
Along the road between Skive and Rødding there are fields and a couple of houses. One of them could be the Faller house I have ordered just to start with something.
In addition, I can make a stopping place for the train. There were a handful of those in addition to real stations between Skive and Rødding stations.
I am not sure if there will be room for Spøttrup castle. But it could be fun:
The brickworks at Nymølle is also among my very early childhood memories. It disappeared in the late sixties. Today, only the chimney is left:
Maybe I could make room for the ring furnace some time way out in the future?
I have printed phase 1 – i.e. the lower 1½ level in 1:1 using SCARM. That gives a bit of impression regarding how difficult or easy it is going to be to reach the lower level track from beneath. And soon I will use the printout as template when I cut plywood for the track.
In addition, I have been to Silvan to buy a bit of wood and some threaded rod (M4).
I bought a tiny piece of MDF instead of plywood. They also had a similar small piece of plywood, but it was skew. In addition the MDF actually feels sturdier and stronger that plywood.
It has to be tested first. Maybe MDF is too stiff and hard? Or maybe there are other problems? That is why I have only bought small samples of the material to be used.
December 2
I have now bought enough wood for the base frame. Silvan had a big pile and I bought all those that I deemed of good enough quality. And that is just enough for my design:
The strange spot where three boards meet is an enforcement that serves two purposes: It shall make the entire construction sturdy and it is where the legs are to be attached. Even though there is only one such indication on the drawing, there shall of course be 4 legs on the layout. These are by the way re-use from the prototype layout. They are height-adjustable round steel legs from IKEA.
Besides, I have bought some fittings. Among them some meant for making a drawer for a keyboard. They are now meant for the ECOS.
As anybody can see, all this is so far only in planning mode. Nothing real is happening. I am to busy with work and much else.
December 18
Finally a day with a bit of railroading time.I have cleaned up on the prototype layout and made a film where the trains are running purely computer controlled, i.e. JMRI / Warrants combined with a simple Jython script.
Besides, I have been using the cross-cut saw to cut the boards into length. Now I just need to put some screws in and my work with the new layout is ongoing:Here the boards are shown on the high edge approximately as the finished base frame will look like:
To screw it all together, I have been measuring, then drilled 2 holes of 3 mm in the longer boards for each joint. Then I put the joint together using clamps:After which I drill as far as possible into the end of the short board with a 2 mm drill and attach with 4×50 mm screws:I found that it is best to start in the middle and work my way out toward the sides and finish with the ends of the base frame.
Today I didn’t manage to put the last 4 of the shortest pieces on, and thereby not the ends either. Hopefully, I will get time for this during Christmas.
December 28
I managed to finalize the frame today. Now it only need legs, before I can get on with building the new layout. For that I need to break down the old layout so that I can re-use the legs, the track, the electronics and not least the space.One last view of the prototype layout before it is broken down:Besides, I have been at Lokdoc in Brøndby to buy the additional track needed for phase 1.
December 29
All electronics and all track is uninstalled:Now I need to put in all in boxes so that I can remove the old baseboard and install the new base frame.
Ready for carrying out:And install. The legs have been transferred to the new base frame using small pieces of the old base board:Now I only lack……. everything. I need to make a board for the electronics. The board must be attached to the wall behind the layout. Or maybe at the back of the frame? And it must be designed so that electronics and wiring becomes manageable. I have to build more decoders and S88 modules. Wiring must be done. Plywood for the track. Servos must be built into new turnouts. Track must be laid. The new layout must be defined in JMRI. Etc. etc. But now the process is ongoing.
I need to build the following electronics:
3 decoders for turnouts
A distribution frame so that I can connect each individual decoder or the programming track to the programming output on ECOS. My idea is to use these RCA sockets and corresponding plugs.
The rest of the current sensors that can be accommodated on the board that I already have.
Maybe another S88 module including current sensors. My first division into blocks tells me that it is not necessary for phase 1. But I am going to need it for phase 2.
Servos in 12 new turnouts out of which one is a 3-way turnout needing 2 servos.
I need to find some kind of connectors for detachable modules.
December 30 and 31
I found a small piece of plywood in Silvan. I thought it was 6,5 mm, but it turned out to be 9 mm. I have cut a 22 cm strip to be used for the rear shadow station. It is somewhat stiff, so I will use 6 mm for the rest of the layout.