
23 april 2023 – første dele bestilt og fintegning påbegyndt
Jeg har bestilt nogen af de stumper, der skal bruges til elevatoren, nemlig det der kan fås som billigt-skidt-og-møg fra Kina. Herunder to NEMA 23 stepper motorer med drivere. De bliver dog sendt fra Tjekkiet, så de burde dukke op indenfor endelig tid.
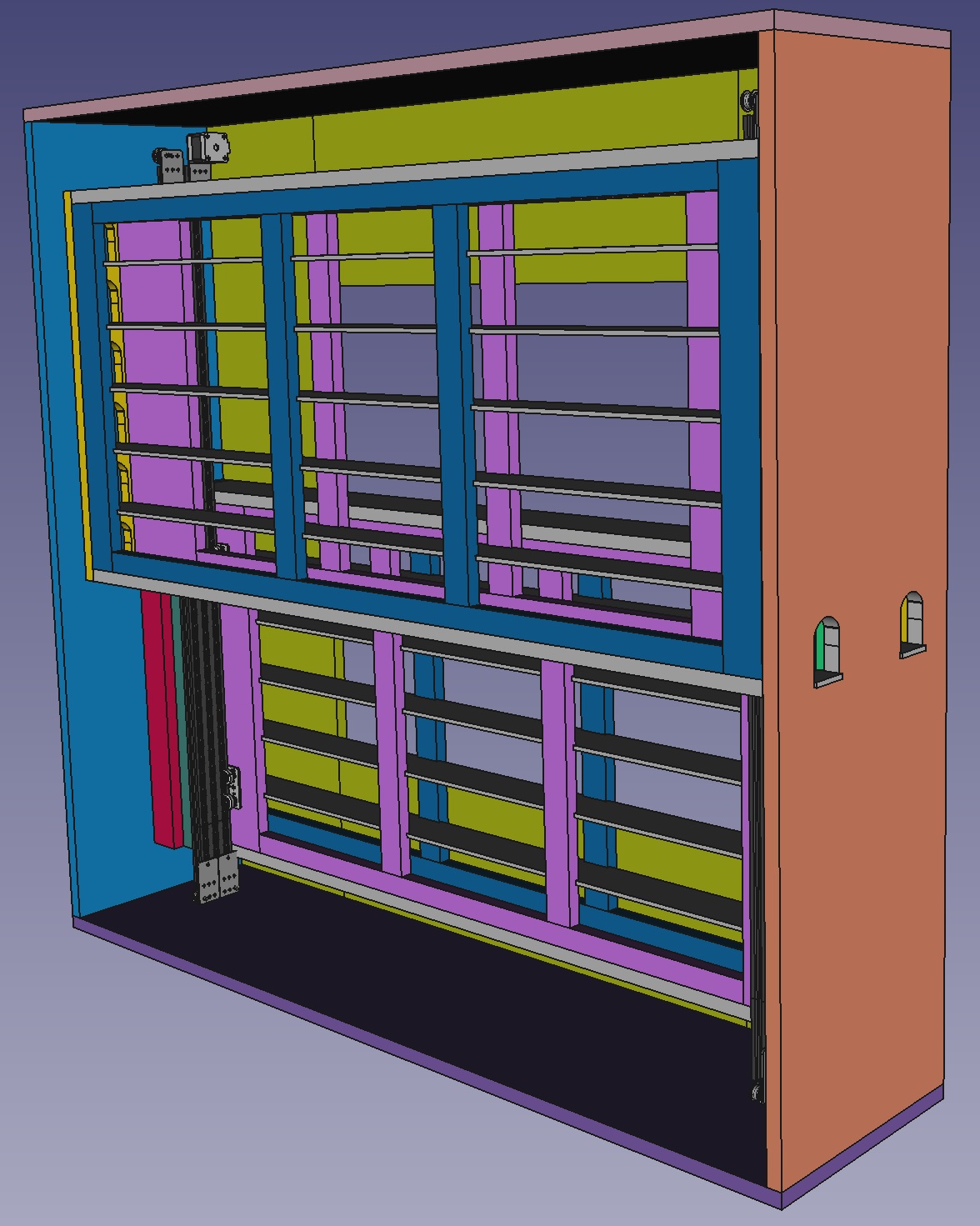
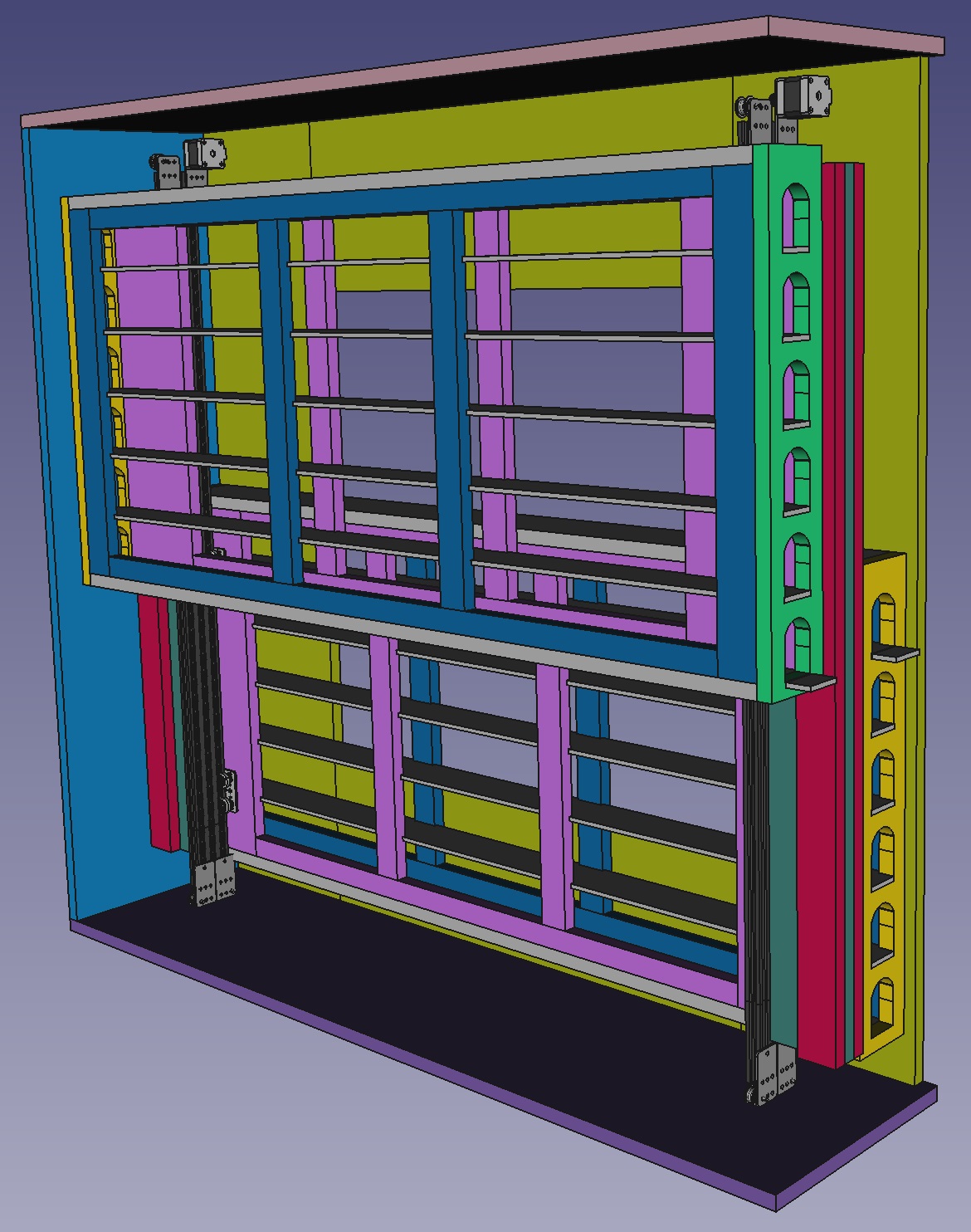
Derudover har jeg tænkt og tegnet anbringelsen af hele seks switche i hver side af elevatoren (en for hver hylde i hver elevatorstol) i stedet for blot en enkelt endestop. Dette for at kunne positionere hver etage præcist. Der skal være nogen 3D printede “knopper” bag på elevatorstolene, sådan at hver af de 6 niveauer passer med at netop en switch aktiveres. Det kan måske være svært at se, men denne tegning er set nedefra. De seks mintgrønne tingester er switchene. Knopperne er ikke med på tegningen. Men de grå flader er elevatorstolene:

Disse to tegninger er af hele elevatoren – med og uden den ene side af rammen:
6. maj – fintegning og beregninger
Jeg har tegnet, hvordan alle stykkerne til elevatoren kan skæres ud af hele MDF plader. Der skal bruges ca. en halv plade med en tykkelse på 6 mm til hylderne. Og hele to en halv på 19 mm. Det fik mig til at regne på, hvad det hele kommer til at veje.
Svaret er ca. 76 kg, fordelt som 49,5 kg for rammen og 13,2 kg pr. elevatorstol. Det er nok lige rigeligt.
Hvis jeg går ned til 12 mm MDF for alt undtagen det stykke, som V-slot profilerne skal skrues fast i, bliver det 52 kg, fordelt som 33,4 kg for rammen og 9,2 kg pr. elevatorstol.
Med 9 mm MDF, med V-slot monteringsstykket på 19 mm og forstærkningerne til samme på 12 mm, kommer jeg ned på 42,3 kg, fordelt som 27,3 kg for rammen og 7,5 kg pr. elevatorstol.
Det kan give visse vanskeligheder at bruge M5 skruer og 6 mm trædyvler i en 9 mm plade. Men i en 12 mm burde det kunne lade sig gøre. Så jeg tænker, at jeg måske kan samle stolene af en kombination af 6 og 9 mm plade ved at fræse spor i stedet for at bruge dyvler og ved at lime forstærkninger på, hvor der skal skrues en gevindbøsning i. Det er sådan (altså at fræse spor) fabrikken har samlet mine vitriner. Og rammen kan være 12 mm MDF plade, så jeg kan samle den med dyvler og skruer. Top og bund behøver dog ikke at være mere end 6 mm. På den måde kan jeg komme ned på 40,2 kg, 27,3 kg for rammen og 6,5 kg pr. stol.
Næste tanke er at bruge 16 mm spånplade til rammen og siderne og top og bund af stolene. Det er stærkt nok til køkkenskabe. Så det må også kunne bruges her. Dog vil jeg stadigvæk bruge MDF til de dele, der skal fræses spor i, til hylderne (som skal være tynde) og til monteringsstykkerne til V-slot profilerne. Da spånplade kun vejer et sted mellem 1/3 og 1/4 af MDF kommer jeg derved ned på 27,7 kg eller 15,9 kg for rammen og 5,9 kg pr. stol.
Og det minder mig om, at jeg nok hellere må genberegne mine to stepper motorers løfteevne. De er opgivet til 1,26 Nm. Og jeg har bestilt en 16 tands remskive. 16x2mm giver en omkreds på 32mm. Det svarer til en radius på ca. 5,1 mm. (1000 mm / 5 mm) x (1,26 Nm / 9,82 m/s2) = 25,6 kg pr. motor. De burde altså fint kunne løfte en elevatorstol – selv uden kontravægtsprincippet.
15. september – genovervejelse af tandrem versus spindler
Jeg er ikke endnu tilbage ved modeltoget. Men man kan jo godt tænke lidt, mens man klipper hæk.
Og lige nu er overvejelsen om jeg virkelig tør at betro 12 togsæt til to tynde tandremme med tilhørende remskiver? Jeg tænker, at det måske alligevel ville være smart at bruge spindler. Det vil muligvis også få elevatoren til at stå stille eller i det mindste “falde langsomt ned”, når stepper motorerne er strømløse. Jeg tænker stadigvæk på spindler med en stigning på 4 (eller måske 2) mm pr. omdrejning. Sammenlign med tandremmenes stigning på 32 mm pr. omdrejning. Dvs. enten 8 eller 16 gange så højt moment og 8 eller 16 gange så langsomt.
Så vidt jeg kan læse mig til kører en stepper motor op til 1000 omdrejninger i minuttet. Jeg kan ikke finde data for de motorer, jeg har købt. Men hvis vi regner med 500 omdrejninger pr. minut, og hvis jeg regner med at elevatoren skal bevæge sig 10 cm pr. etage bliver hastigheden:
Tandrem: 100 mm/etage / 32 mm/omdrejning = 3 omdrejninger/etage. Dvs. 3 omdrejninger/etage / 500 omdrejninger/minut = mindre end 1/2 sekund pr. etage. Teoretisk (der skal accelereres op og ned) men i hvert fald mere end hurtigt nok.
Spindel med 2 mm/omdrejning: 100 mm/etage / 2 mm/omdrejning = 50 omdrejninger/etage. Dvs. 50 omdrejninger/etage / 500 omdrejninger/minut = 6 sekunder/etage eller 36 sekunder for 6 etager. Og måske lidt mere i virkeligheden pga. acceleration op og ned. Eller mindre, fordi motoren kan køre mere end 500 omdrejninger/minut. Men det virker egentlig ganske passende.
29. september 2023 – sensorer og homing
Jeg var i gang med at designe software og kalibrering af antal steps for at ramme højderne helt rigtigt, da det gik op for mig, at der slet ikke skal være en sensor (microswitch) per etage per side. Det bliver alt for kompliceret. Og det giver ingen ekstra præcision. Den eneste fordel ville være, at man ikke altid behøver at initialisere til nulpunktet (hvilket måske tager op til 40 sekunder).
Sådan laver man heller ikke en 3D printer. Sådan en “homer” alle akser under initialisering, så man ved hvor nulpunktet er. Og til det er en enkelt end-stop microswitch ret præcis.
En anden helt ny tanke, jeg har fået, er, at det ikke er sikkert, at jeg kan få begge elevatorstole til at passe nøjagtigt med skinnerne samtidig. Dvs., at jeg nok skal se på det som 12 etager og ikke 6 dobbelt-etager.
Rent mekanisk betyder det, at jeg kun skal bruge to microswitche, nemlig en i hver side af bunden af den ene elevatorstol (eller toppen af den anden). Og disse switche skal anbringes på siden af elevatorstolen. Ikke under bunden (eller toppen) af elevatorstolen så den bliver klemt. Og switchen skal aktiveres når elevatoren er mere end f.eks. en centimeter under nederste etage, og den skal vedblivende være aktiveret i hele stolens fysiske bevægelsesrum længere nedad.
Og kalibreringen betyder, at jeg skal kende antal steps i hver side af 12 etager i forhold til nul, som er defineret som netop der, hvor endestop switchen ikke er aktiveret, når elevatoren bevæges opad. Ikke andet. For når elevatoren skal bevæges til en etage begynder jeg med at bevæge den til en position 10 mm længere nede og derefter langsomt op til det rigtige niveau. Dvs. bevægelsen er altid opad.
26. oktober 2023 – Layout overvejelser
Jeg har leget lidt med Anyrail. Hvis jeg anbringer elevatoren så langt som muligt til højre på endevæggen kan jeg få plads til at åbne den skabslåge, som er til venstre for elevatoren. Og jeg kan også få plads til en vendesløjfe, som ganske vist kommer til at spærre for den ene elevator-udkørsel:

Eller jeg kan undlade vendesløjfen og i stedet bruge alle fire elevator-udkørsler:

Jeg hælder lige nu mest til at få vendesløjfen. Men jeg lader lige ideen “simre” lidt.
11. november 2023 – vægtoverraskelse
Jeg har for et stykke tid siden gentegnet og genberegnet elevatoren, så alt undtagen selve hylderne bliver 16 mm spånplade. Og hylderne stadigvæk 6 mm MDF.
Beregningen sagde 4,7 kg pr. stol og 20,8 kg for hele træ-delen. Men: Det var baseret på Bauhaus’ oplysninger om, at en hel spånplade vejer 10,8 kg. Det viser sig bare, at det er vægten pr. kvadratmeter. Så det bliver tre gange så tungt. Men det matcher sådan set meget godt et HTH højskab på 195x60x55 cm. Inklusiv låge og 5 hylder vejer det 64 kg. Jeg har lige slået det op på deres hjemmeside. Og det hænger man gladeligt på væggen vha. nogle få store skruer.
For at få lidt mere styr på vægten vejede jeg to stykker, som udgør lidt under en halv plade. Og ud fra det siger mine beregninger, at hver elevatorstol kommer til at veje 9,9 kg og rammen 32,6 kg. Og det er uden tog, skinner og elevator-mekanik.
Den samlede vægt gør ikke så meget. Væggen i huset skal nok holde. Og 5 skruer med ordentlige plugs kan fint holde flere hundrede kg.
Men kan to tandremme og to små remstrammerhjul bære to elevatorstole på hver 10 kg? Det må vi håbe. Ifølge diverse sider kan en tandrem holde til 86 N pr. mm bredde. Det giver, at en 6 mm rem kan holde til 52 kg. Og en 10 mm til 85 kg. 16 mm svarer til 140 kg. Det burde altså gå an med de 6 mm. Men det kan godt være, at jeg skulle bestille noget kraftigere.
Jeg kan også prøve at “slanke” elevatorstolene. Jeg kan f.eks. bore en masse huller overalt. Eller 3D printe visse dele. For at forstå, hvor meget vægt, der kan spares ved 3D printning, prøvede jeg at beregne vægten af en 3D printet hylde. Det bliver ca. 300 gram. En MDF hylde vejer ca. 400 gram. Dvs., der kan spares et kg pr. elevatorstol. Måske ville jeg vha. alle mulige tricks kunne få en elevatorstol ned fra de 9,9 kg til f.eks. 7,5 kg. Men jeg tror ikke, at det er umagen værd.