
7. april – Langfredag
Jeg er ikke kommet videre, udover at jeg har købt 100 gevindbøsninger og skruer. Og fået lavet en masse havearbejde.
Til gengæld har jeg fået ny inspiration fra to fronter.
For det første var jeg til DMJU messe, hvor jeg bed mærke i Schmalspuranlage “unteres Preßnitztal” i bunden af hal B. Ikke så meget pga. det meget flotte og naturtro landskab m.v., men mere for den flotte backdrop, som virkelig gav noget visuel dybde og som på dygtig vis blev brugt til få toget til at “forsvinde” i horisonten og dukke op i den anden side af panoramaet. Jeg fik ikke taget et billede af det. Men det er der heldigvis en, der har gjort her. Se efter “unteres Preßnitztal”.
For det andet faldt jeg over en halvgammel Youtube video om en tog-elevator i Kælderkøbing.
De to ting fik mig til at tænke på, om det mon er umagen værd at bygge i to etager? Eller om jeg i det mindste skal undgå op- og nedkørsler mellem de to etager ved at bygge en elevator imellem dem? Det ville muliggøre meget større afstand mellem dem. To landskaber, måske.
Jeg vil efter den hidtidige plan kun bruge underetagen til to ting, nemlig at have vendesløjfe og at kunne parkere en masse tog. Især op- og nedkørsler vil give problemer på grund af hældninger og snævre sving. Og afsporinger, beskidte skinner og dårlige sporskiftere er ikke særlig sjovt i en skjult underetage.
Alternativet er at skjule en elevator med plads til en masse tog i flere lag bag et backdrop i bunden af min hestesko.
Jeg er endnu ikke helt enig med mig selv om, hvorvidt jeg kan undvære vendesløjfen. Det vil muligvis se lidt fjoget ud at et gammeldags lokomotiv-trukket tog kører baglæns den ene vej. Med MY, MX, MZ kan det løses med en mulighed for omløb. Men med et damplokomotiv er det hmmmm. Til gengæld vil min to-etager løsning alligevel kræve, at toget bakker ned i underetagen, rundt i vendesløjfen og – stadig baglæns – op på øverste etage igen. Så kan den for så vidt lige så godt bakke bag om backdroppet, hen over elevatoren og ud på den anden side. Nuvel, så kører den kun fra station A til B og aldrig fra B til A, som den ville kunne med vendesløjfen. Med mindre, at jeg laver en vendesløjfe på den modsatte væg. Så vil layout’et se sådan ud:
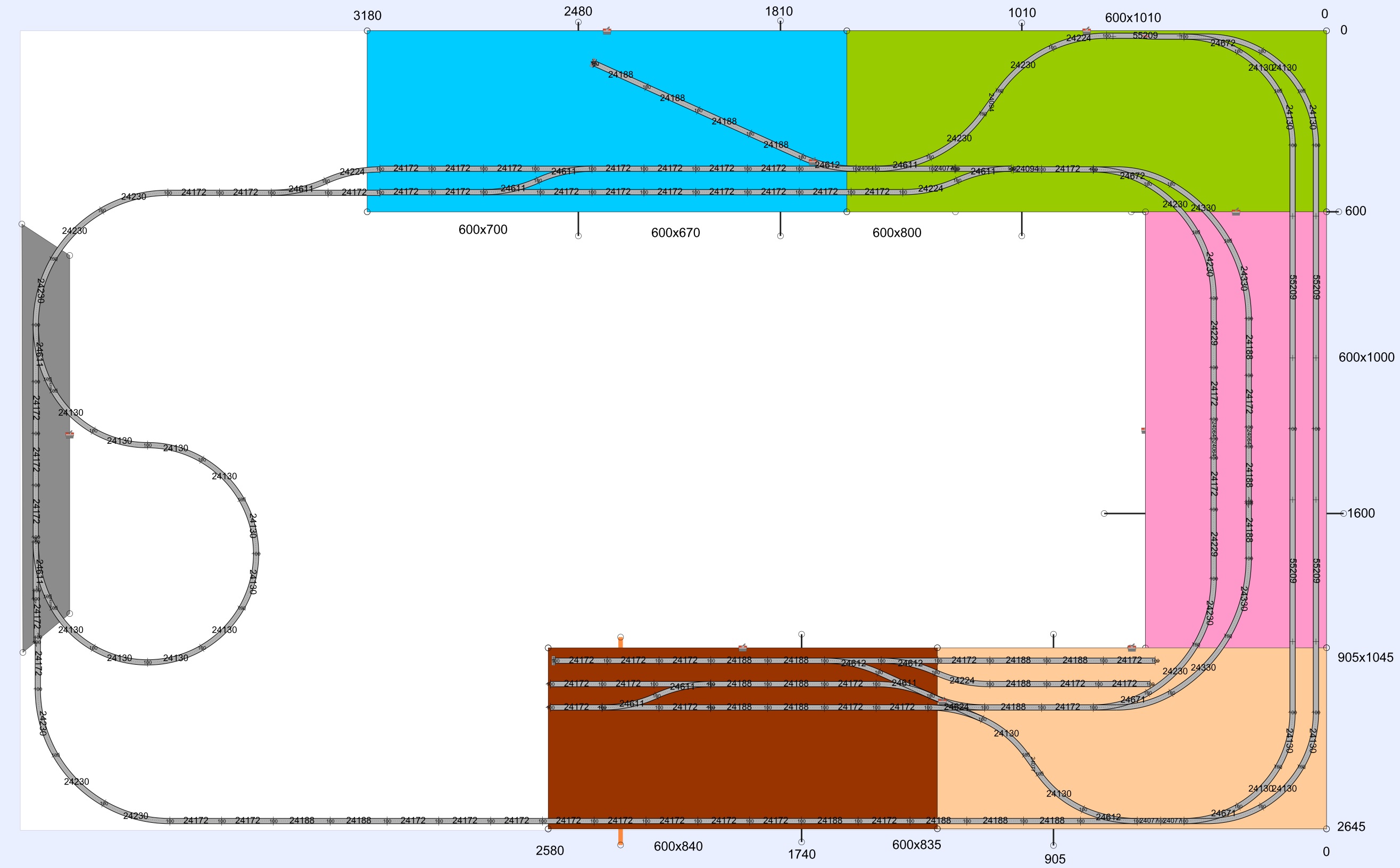
De to skinnestykker længst til højre er elevatoren. Eller rettere elevatorerne.
Jeg hælder nemlig til at bygge to elevatorer. Dels har jeg begrænset loftshøjde i forhold til den hylde, hvor toget skal køre. Så der bliver ikke plads til mange tog pr. elevator. Og dels skal der en del motorkraft og solide aksler til at løfte en elevator, der trods alt kræver en del krydsfiner (eller MDF) plade. For akslernes vedkommende især, hvis de er lange.
I kælderkøbing er problemet med den kraftige motor løst ved at han har brugt understellet fra et hæve/sænke skrivebord. Men dels har sådan et begrænset slaglængde og dels vil den nok være svær at styre præcist nok.
To elevatorer kan være hinandens kontravægte, hvis de er koblet sammen, således at den ene går ned, når den anden går op. Hertil har jeg hentet inspiration fra “The Falkirk Wheel”, som jeg en gang besøgte under en ferie i Skotland. Her udnyttes princippet til at løfte skibe op og ned i en elevator.
Mekanismen har jeg tænkt mig at bygge af de elementer, som OpenBuilds bruger til at bygge CNC maskiner af. Der opnår man god præcision vha. step-motorer. Jeg planlægger at bruge to stk. V-slot 20×60 mm profiler – en i hver side. På hver af disse profiler skal elevatorerne køre op og ned – en elevator på hver side:
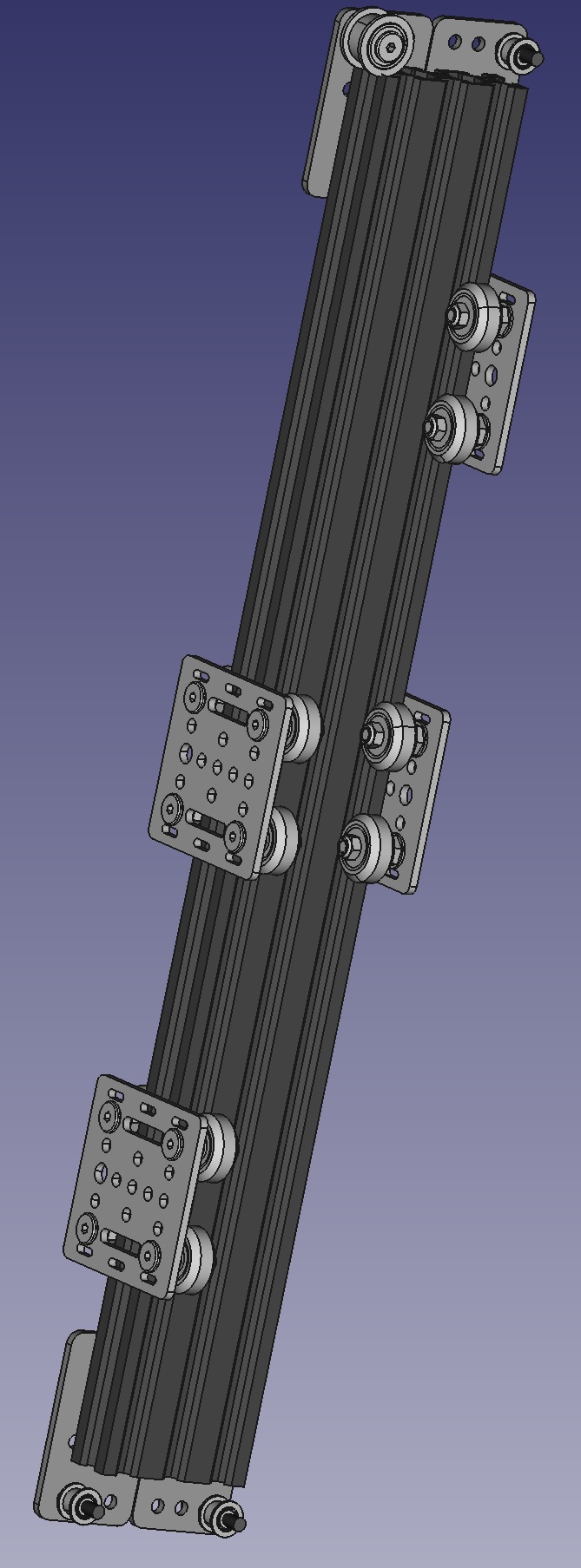
Der skal være i alt fire af disse “vogne” pr. elevator. To for oven og to for neden. Og elevatorerne skal være forbundet med hinanden med en tandrem, der går hele vejen rundt, sådan at de følges fuldstændig ad, altså så den ene går præcis lige så langt op, som den anden går ned. Det vil jeg opnå ved at skrue tandremmen fast i alle fire “vogne”, så den går hele vejen rundt om V-slot profilen. I hver ende skal der placeres to remstrammere for at remmen kan komme rundt.
Når der på den måde er to elevatorer, der er i nær perfekt balance, og som ikke skal bevæges meget mere end en halv meter op og ned, kan jeg forhåbentlig nøjes med en enkelt NEMA 17 step-motor og en simpel spindel. Men jeg køber nok den mest momentstærke NEMA 17 og en spindel med en stigning på kun 4 mm pr. omdrejning. Spindlerne i en 3D printer er typisk med 8 mm stigning. Og ved at halvere den får man fordoblet kræfterne og halveret hastigheden, hvilket vist passer meget godt til en tog-elevator. Sådan en spindel hedder SFU 1204, og kan – ligesom alt det andet – købes mange steder, både i Kina og hos danske MakerSupplies.dk, hvor den kommer som et kit med lejer og det hele. Til ca. 1.000 kroner. 1204 betyder i øvrigt 12 mm i diameter og 4 mm stigning pr. omdrejning.

MakerSupplies har en NEMA 17 motor med et maksimalt drejningsmoment på 0,85 Nm. Det bør betyde, at hvis man i princippet monterer en remskive med en radius på en meter, så kan den løfte 0,85 N / 9,82 m/s2 = 0,0866 kg i en snor rundt om denne remskive. De 9,82 m/s2 er tyngdeaccelerationen på jordoverfladen.
Hvis radius af remskiven i stedet er 6 mm (halvdelen af spindlens diameter) svarende til at snoren vikles rundt om spindlen, vil motoren på en rigtig god dag kunne løfte 0,0866 * 10000 / 6 = 14,4 kg.
Spindlens omkreds er 2 * pi * 6 mm = 37 mm. Dvs., at spindlen udgør en gearing på 37 : 4, eller cirka 9 : 1. Altså burde spindel og motor kunne løfte 9 * 14,4 kg = 130 kg. Selvom det selvfølgelig er et teoretisk maksimum, må den mere end rigeligt kunne klare opgaven med at flytte to elevatorer, der nogenlunde udbalancerer hinanden.
Motoren skal drives af en step-motor driver, som forsynes med rigelig strøm fra en 24 volt spændingsforsyning, og som styres af en Arduino eller noget lignende. Og der skal nødvendigvis være en form for sensor, der kan fortælle Arduinoen, hvilken position, der er udgangspunktet. For en step-motor kan ganske vist styres meget præcist, men kun i form af et antal steps i den ene eller den anden retning. Ikke i form at en præcis position. Det kan kun en servo.
På en af mine sider fra 2016 har jeg henvist til NElevator. Det ser ikke ud til, at det blev den store kommercielle succes. Deres sidste nyhedsbrev er fra 2018. Men galleriet viser mange fine detaljer. De har også to elevatorer. Og de skriver et sted, at de er hinandens kontravægte. Det var måske oprindeligt ideen? Men det er endt med to uafhængige elevatorer med hver deres basse af en motor, der via et snekkedrev trækker en aksel, hvori elevatoren hænger i en tandrem i hver ende. Jeg kan ikke se på billederne, om der måske er en kontravægt i tandremmene. Men det er der måske.
En interessant detalje ved NElevator er den måde, de får strøm i skinnerne på elevatorerne: Der er fysiske kontakter, så der kun er strøm i den skinne, der findes i korrekt højde. Dvs., at der ikke er behov for ledninger ud i elevatoren. Og ingen tog kan få strøm til at køre ud af den forkerte etage af elevatoren. Kontakterne er en strimmel beryllium kobber, som er bøjet så snedig, at den skaber kontakt direkte på skinnerne. Eftersom jeg kører 3-skinne system kan jeg ikke direkte kopiere dette. Men jeg kan sagtens bruge princippet. Og kontakterne kan eksempelvis købes hos Mouser.
10. april
Ved nærmere omtanke duer det ikke med kun en enkelt spindel. Så vil der ikke være en mekanisme til at sikre, at begge sider af elevatorerne er i samme niveau. Og to stk. af de dyre sammen med to dyre motorer bliver for meget. Derfor bliver næste skud to af de billige spindler med 8 mm stigning og en radius på 4 mm og to motorer med et drejningsmoment på 0,4 Nm.
Omkredsen af sådan en spindel er 2 * pi * 4 mm = 25,13 mm. Det giver en gearing på 25 : 8 eller cirka 3 : 1.
Og hver motor vil (på spindlen) kunne løfte 0,4 Nm / 9,82 m/s2 * 1000 mm / 4 mm = 10,18 kg. Ganget med gearingen er det ca. 30 kg / motor. Altså stadigvæk mere end rigeligt.
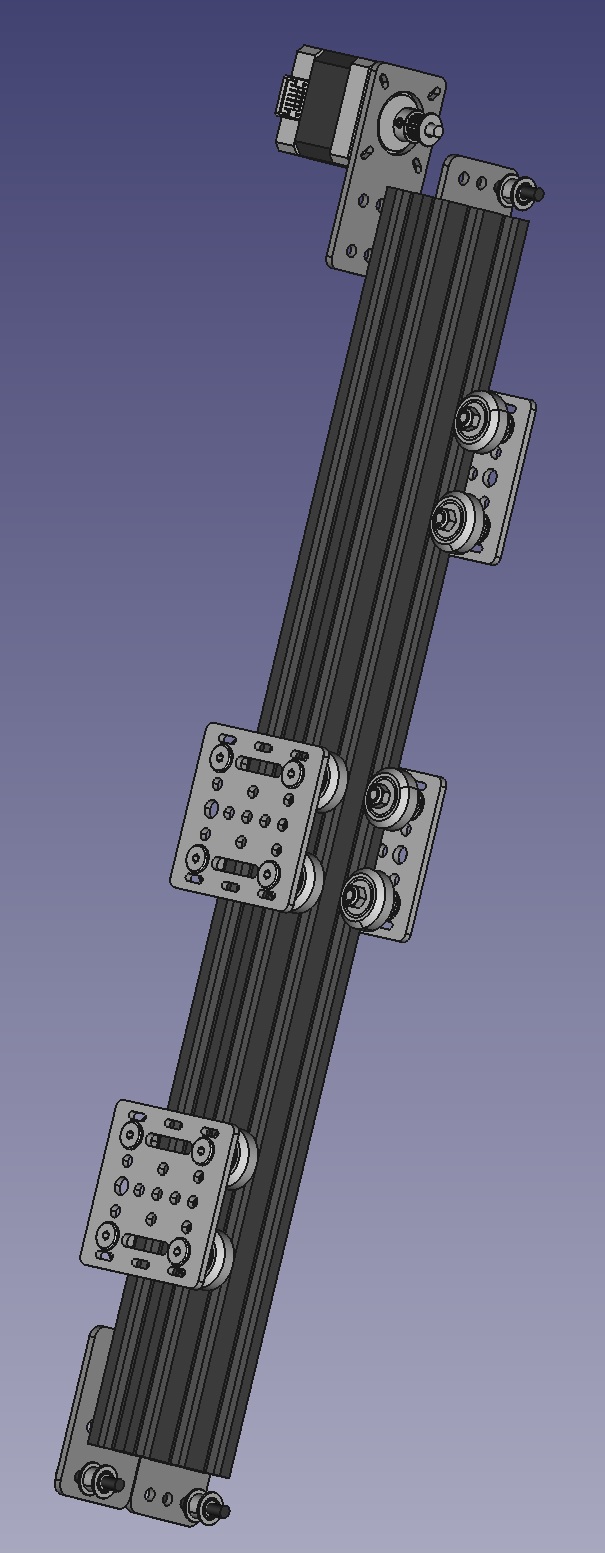
Jeg kunne også spare spindlerne og lade motorerne trække på tandremmene i stedet. Det vil være mekanisk en hel del simplere. Med en remskive på 14 mm i diameter (radius 7 mm) ville hver motor kunne løfte hhv. 0,85 Nm / 9,82 m/s2 * 1000 mm / 7 mm = 12 kg og 0,4 Nm / 9,82 m/s2 * 1000 mm / 7 mm = 5,8 kg. Så måske skulle jeg køre los med to af de store motorer og remtrækket? 2 * 12 = 24 kg burde være nok.
Dvs., at mekanikken simpelthen består af to af disse:
12. april
Jeg har skitseret, hvordan to elevatorer kunne se ud inde i en stabil ramme. Jeg har tegnet den ydre ramme som 24 mm MDF, rammen om hver elevatorstol som 19 mm MDF og hylderne, hvor skinnerne skal på, som 6 mm MDF:
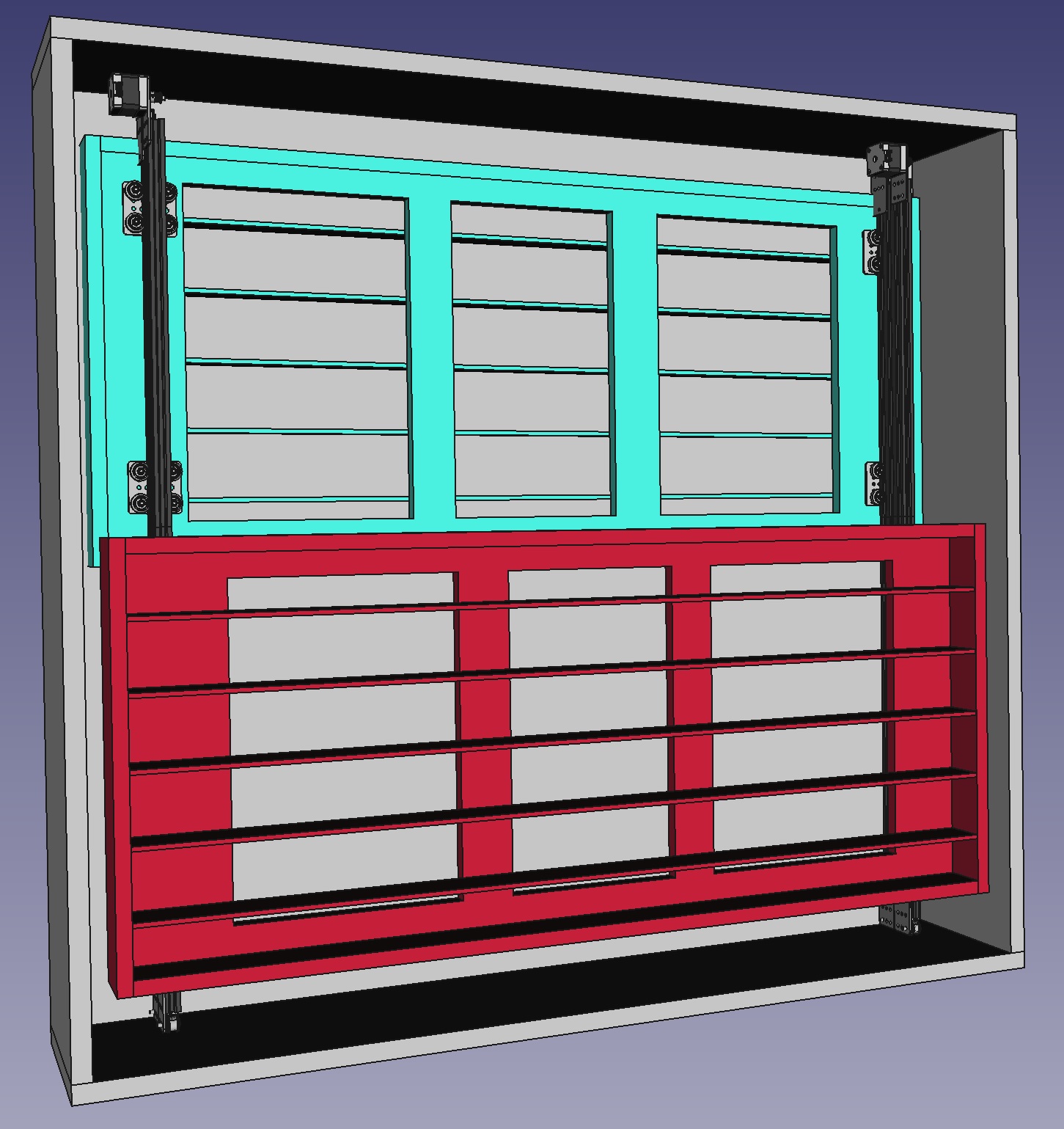
Bemærk, at man skal kunne se alle tog – også dem i den bagerste elevator. Derfor – og for at spare vægt – har jeg tænkt mig at save de viste store huller bag i hver elevatorstol.
Tegningen er endnu ikke helt målfast, hylderne svæver frit inde i elevatorstolene, og hele indmaden svæver ligeledes frit inde i den ydre ramme. Desuden skal togene have nogen huller at køre ud og ind af og der mangler der en akrylplade i fronten til at lukke af for støv. Og det skal besluttes, hvor der skal limes, skrues og boltes for at realisere alle samlingerne. Så der er lidt designarbejde endnu.
V-slot profilerne kan gøres fast vha. en 19 mm MDF fra top til bund i yderrammen, som gøres fast i side, top og bund af samme yderramme.
Mht. vægten, så vejer 19 mm MDF ca. 14 kg/m2. Så en elevatorstol kommer vel til at veje i omegnen af 10 kg. Stærkt afhængigt af hvor store huller, jeg ender med at save.
Yderrammen kommer til at bestå af rundt regnet 4 m2 plade. 4 * 14 * 24/19 = 71 kg. Måske skal jeg også her overveje at slanke den noget ved at save store huller i bagsiden? Jeg kunne måske halvere vægten?
15. april
Jeg har lavet ovenstående tegninger i FreeCAD. Det er et gratis og nogenlunde nemt program til 3D tegning. Men for at skitsere lidt og regne præcise dimensioner ud, er jeg gået tilbage til PowerPoint, hvor jeg har lavet dette:
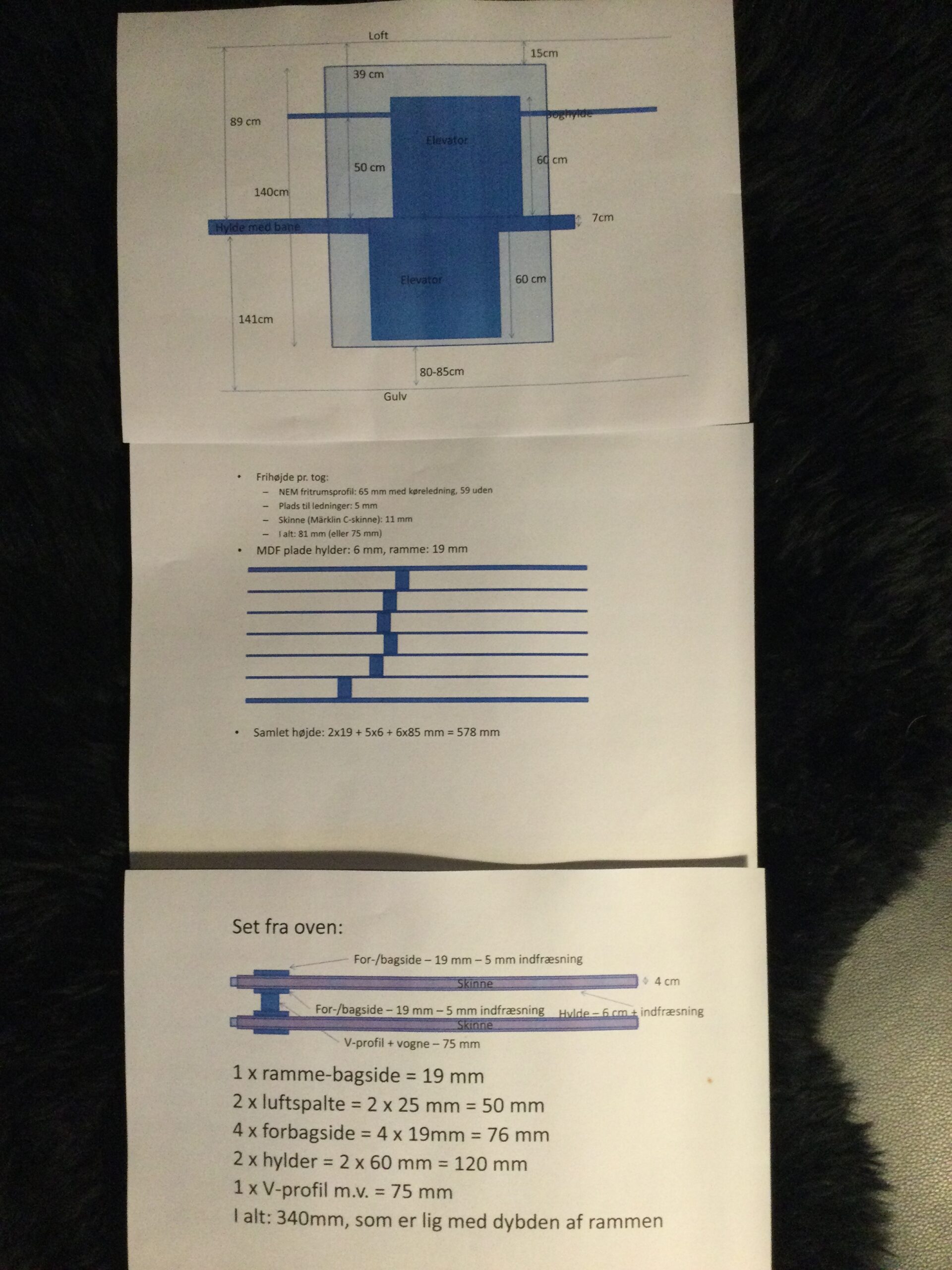
Nu skal 3D tegningen opdateres med disse dimensioner. Og det skal besluttes, hvordan detaljerne skal laves. Jeg har besluttet at gå ned til 19 mm MDF til den ydre ramme. Og at elevatorstolene har både for- og bagside af 19 mm MDF, hvori der skal fræses 5 mm dybe spor til de 6 mm MDF plader, der skal udgøre hylderne.